2 behaviour of the function (example), 9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 150
9400 HighLine | Parameter setting & configuration
Basic drive functions
Standard stop | Behaviour of the function (example)
150
Firmware 1.37 - 09/2006
L
9.2.2
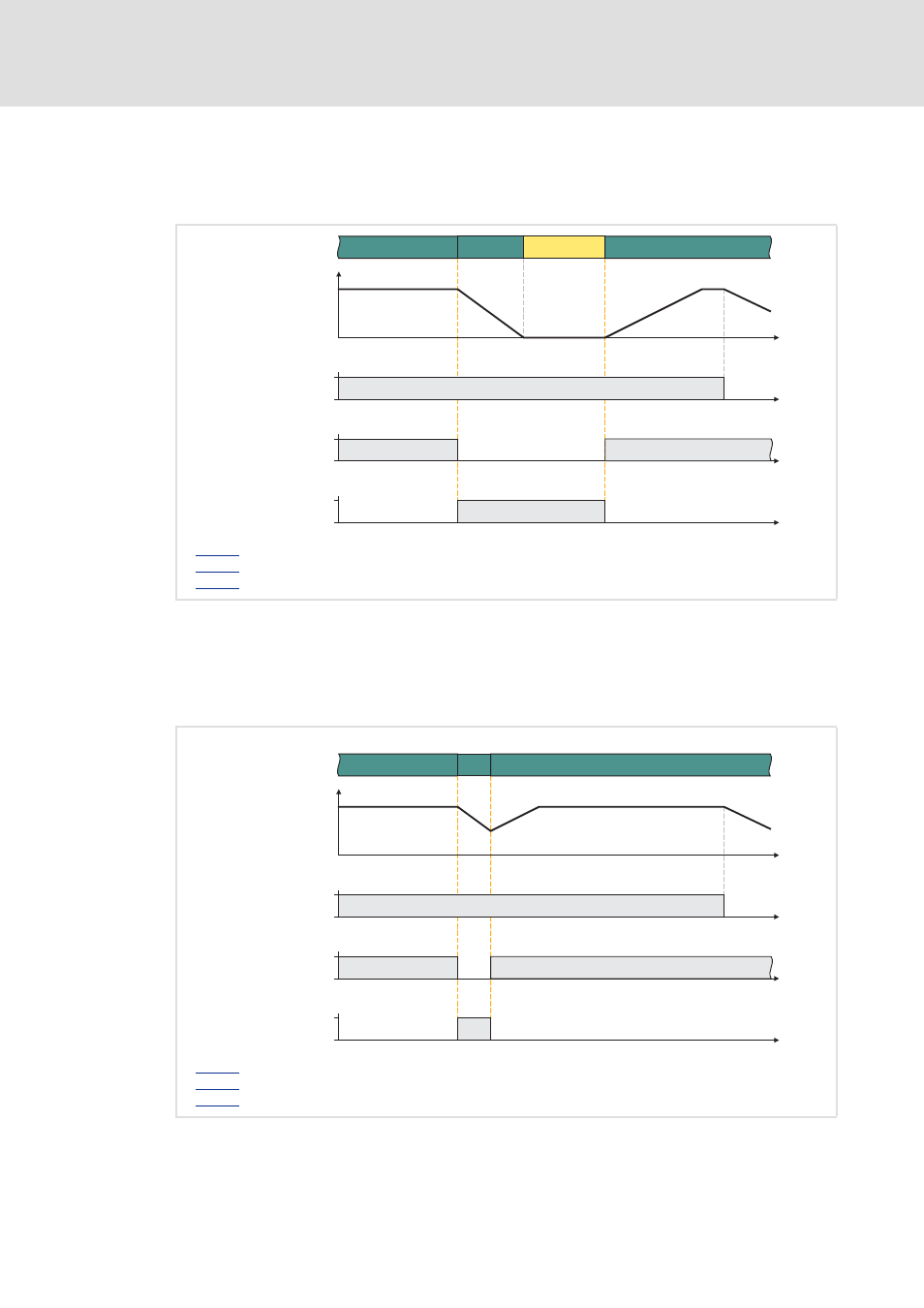
Behaviour of the function (example)
In the following example the enable of manual jog is deactivated during an active manual
jog. Then the drive is braked to standstill within the deceleration time n set for stop:
[9-5]
Example: Stop with reaching standstill
If the basic function "Manual Jog" is reactivated within the deceleration time n, this basic
function takes over the control of the drive from the current speed and the function state
"Drive is stopped" is abandoned immediately:
[9-6]
Example: Stop without reaching standstill
n
: Deceleration time for stop function
o
: Manual acceleration
p
: Manual deceleration
n
t
TRUE
FALSE
MAN_bEnable
t
ManualJog
Stopping
Standstill
ManualJog
TRUE
FALSE
STP_bStopActive
t
TRUE
FALSE
MAN_bJogPositive
t
State
n
: Deceleration time for stop function
o
: Manual acceleration
p
: Manual deceleration
n
t
TRUE
FALSE
MAN_bEnable
t
ManualJog
Stopping
ManualJog
TRUE
FALSE
STP_bStopActive
t
TRUE
FALSE
MAN_bJogPositive
t
State