9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 220
9400 HighLine | Parameter setting & configuration
Basic drive functions
Brake control | Parameter setting
220
Firmware 1.37 - 09/2006
L
r
To ensure the correct direction at start-up, the speed controller is loaded with the
following starting torques:
r
This results in the following behaviour depending on load and direction:
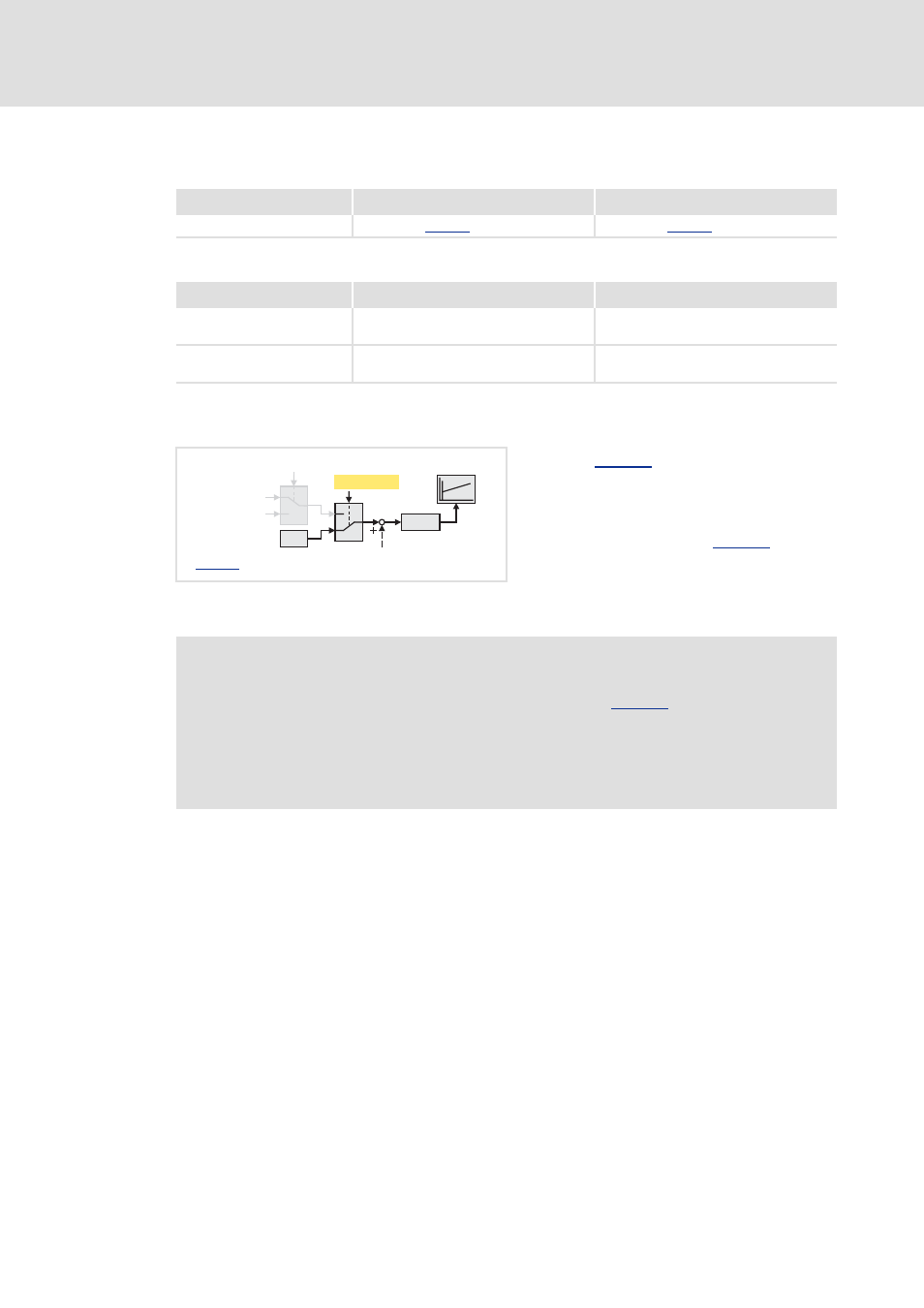
Feedforward control with memorised torque
[9-16] Feedforward control with parameterised starting torque
Lifting
Lowering
Starting torque:
= 10 Nm
Lifting
Lowering
Behaviour at max. load:
Optimum behaviour
Start-up a bit fast, but correct direction
(non-critical).
Behaviour without load:
Start-up a bit fast, but correct direction
(non-critical).
Optimum behaviour
p
: Waiting torque source
r
= 1, the starting torque
is the setpoint which has been
automatically memorised during the
last closing process (falling below the
speed threshold set in
1
0
1
0
C02588 = 1
S&H
CTRL
Speed controller
Note!
The higher the threshold for brake activation set in
, the higher is the
dynamic part in the marked torque (e.g. the speed-dependent friction torque).
In the special case that the load changes when the brake is closed, a correction
value, which is added to the marked torque, can be defined for the torque
precontrol via the input BRK_dnTorqueAdd_n.