1 operating mode, 2 signal configuration, 1 operating mode 9.11.1.2 signal configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 213: 9400 highline | parameter setting & configuration, R mode 1/11: direct control of the brake
L
Firmware 1.37 - 09/2006
213
9400 HighLine | Parameter setting & configuration
Basic drive functions
Brake control | Parameter setting
9.11.1.1
Operating mode
Various operating modes are available in
for different applications and tasks:
r
Mode 0: Brake control is switched off
r
Mode 1/11: Direct control of the brake
– Without using a special logic or automatic, can be used, for instance, to check in a
simple manner if the brake operates correctly.
r
Mode 2/12: Automatic control of the brake
– The common mode for controlling mechanical holding brakes with or without
holding torque precontrol.
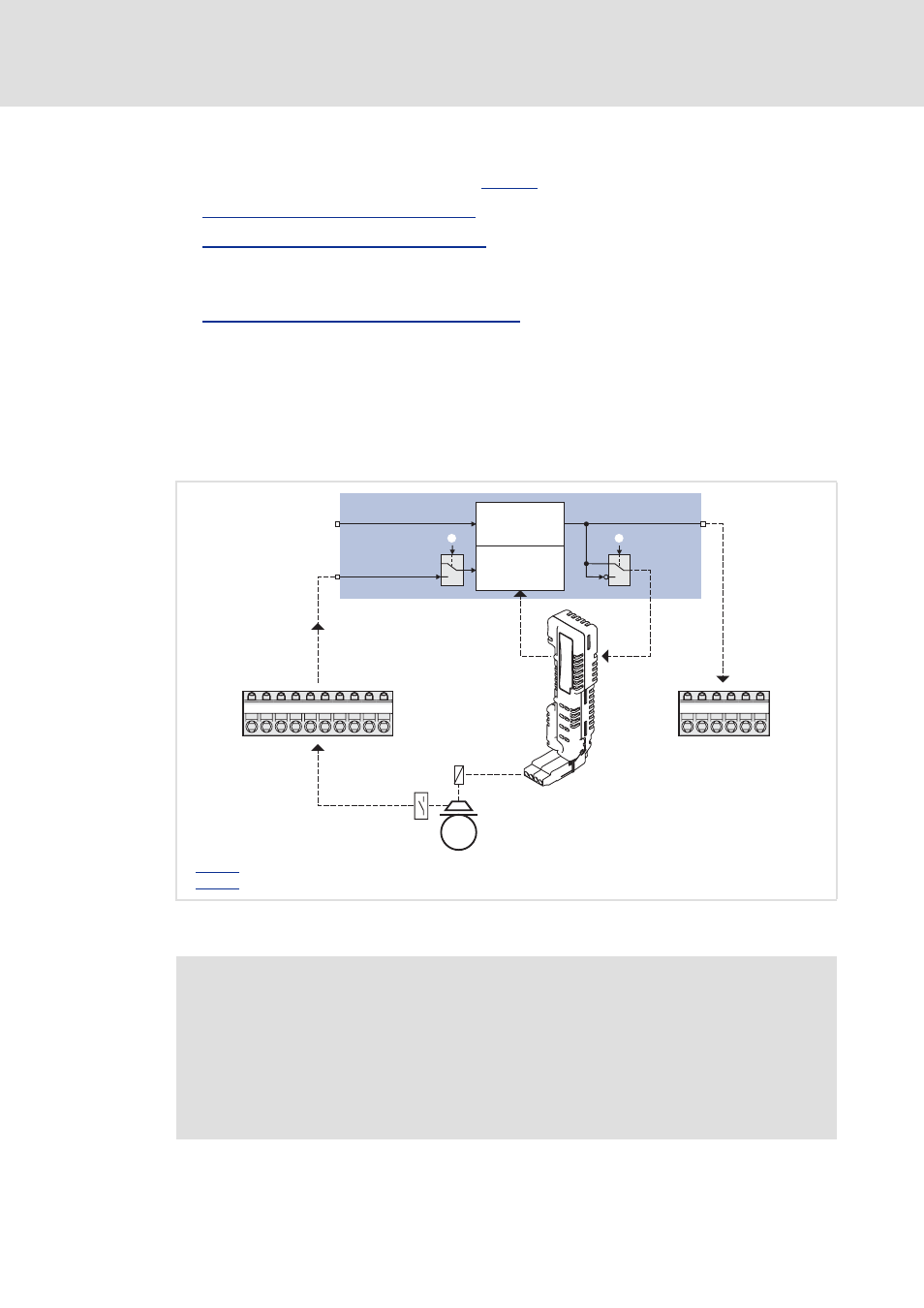
9.11.1.2
Signal configuration
The signal configuration of the control and status signals for the brake logic and
monitoring function is executed via the parameters shown in the following signal flow:
[9-8]
Signal configuration of the control and status signals
n
: Status input monitoring
o
: Brake control polarity (for brake module)
Brake logic
1
0
1
0
Control
Feedback
M
Digital I/O
GI
RFR
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
Feedback
GO
24O
DO1
DO2
DO3
DO4
Digital I/O
Control
Monitoring
BRK_bBrakeApplied
BRK_bReleaseBrake
BRK_bReleaseBrakeOut
Note!
• If an electrically holding (self-releasing) brake is to be controlled instead of an
electrically releasing (self-holding) brake, the corresponding control and
status signals must be inverted!
• For detailed information about the assembly and electrical installation of the
motor holding brake, please see the documentation for the brake module and
the brake.