11 optimise current controller, Optimise current controller, C 81) – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 81: 9400 highline | parameter setting & configuration
L
Firmware 1.37 - 09/2006
81
9400 HighLine | Parameter setting & configuration
Motor interface
Initial commissioning | Optimise current controller
5.1.11
Optimise current controller
In a test mode you can select current setpoint step-changes and optimise the parameter
settings of the current controller (gain and reset time).
M
How to optimise the current controller in the test mode:
1. If the controller is enabled, inhibit the controller, e.g. with the device command
= "41").
2. Activate the test mode for the current controller with
3. Select the effective value of the current setpoint step change under
.
• The peak value of the measurable motor current will be 1.41 times higher.
4. Enable the controller for a short time and measure the step response of the motor
current in the motor phases using the oscilloscope and clamp-on ammeters or
record the field-oriented direct-axis current using the
function in the
• Motor control variable to be recorded:
current.dnDirectCurrentAct (field-oriented direct-axis current)
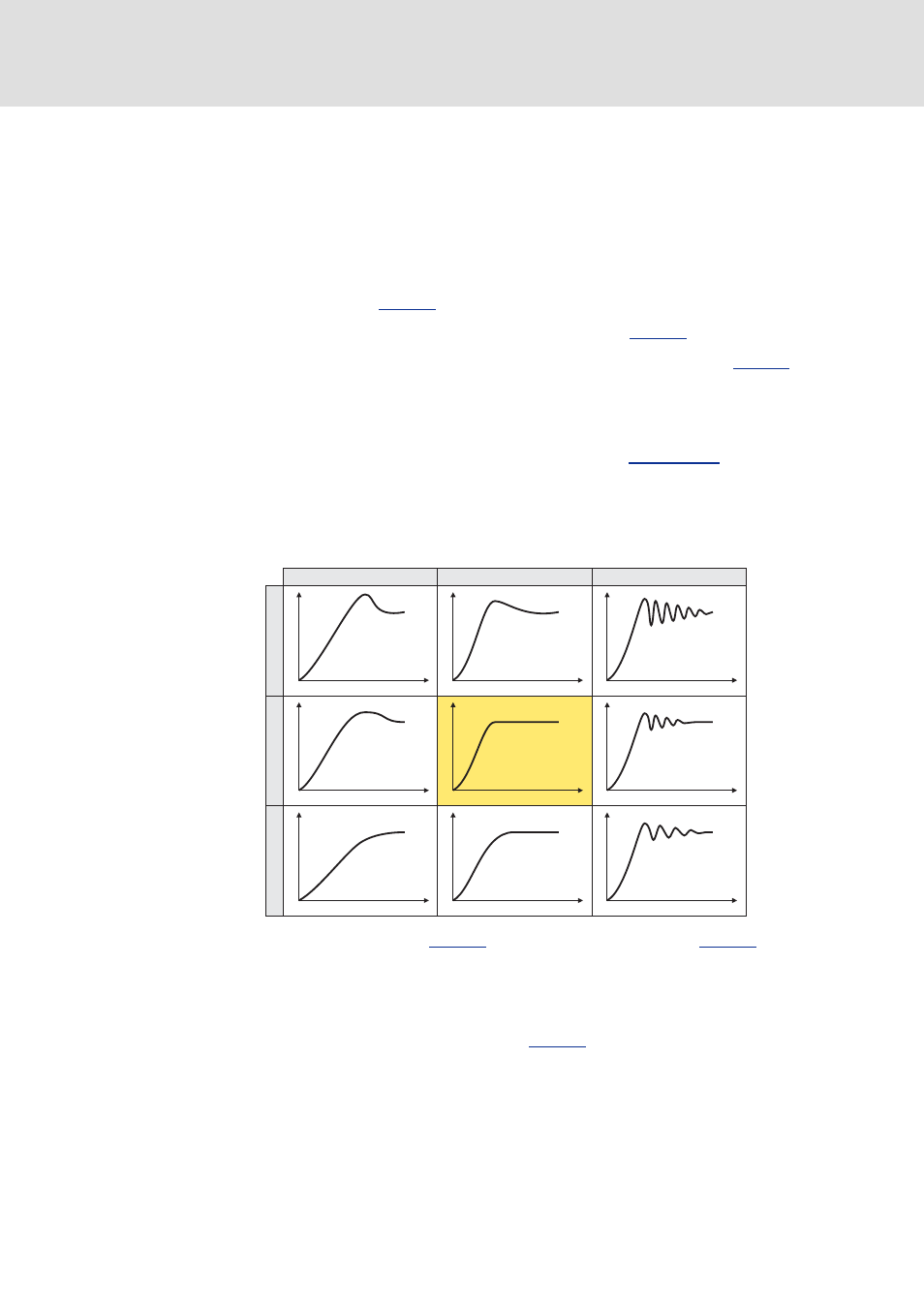
5. Evaluate the step response:
6. Change the gain Vp under
and the reset time Tn under
7. Repeat steps 4 ... 6 until the optimum step response of the motor brake is reached.
• After optimisation, the current control time is typically 0.5 ... 1 ms.
• If the adjustment results are not satisfactory, the decoupling network can be
additionally activated via the setting
= "1". After this, repeat the steps
2 ... 6.
• In case of MCS results may only be achieved with a current-dependent
correction of the leakage inductance. For this purpose, it is required to use a
motor with an electronic nameplate (ENP) or to set the saturation characteristic
manually (see the following section).
I
t
I
t
I
t
I
t
I
t
I
t
I
t
I
t
I
t
Vp < Vp opt.
Vp = Vp opt.
Vp > Vp opt.
Tn
<
Tn
opt.
Tn
=
Tn
opt.
Tn
>
Tn
opt.