9 torque follower, 1 signal flow, Torque follower – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 196: C 196), Torque, Follower, Signal flow - torque follower, Signal flow - torque follower (c 196), Torque follower (c 196), 9400 highline | parameter setting & configuration
9400 HighLine | Parameter setting & configuration
Basic drive functions
Torque follower
196
Firmware 1.37 - 09/2006
L
9.9
Torque follower
This basic function is used as setpoint interface for torque-controlled drives.
r
The motor control is automatically changed over to torque control with speed
limitation.
r
As an option, an internal interpolation of the torque setpoint can be carried out in order
to specify the setpoint with reduced cycle rates without the drive behaviour being
unsteady. The detection of the cycle rate and the synchronisation of the setpoint
transfer is carried out automatically.
r
If the direction of rotation of the motor must be inverted due to the mounting position
of the motor or the existing gearbox ratio the use of the control signals can be changed
over accordingly via parameter setting.
9.9.1
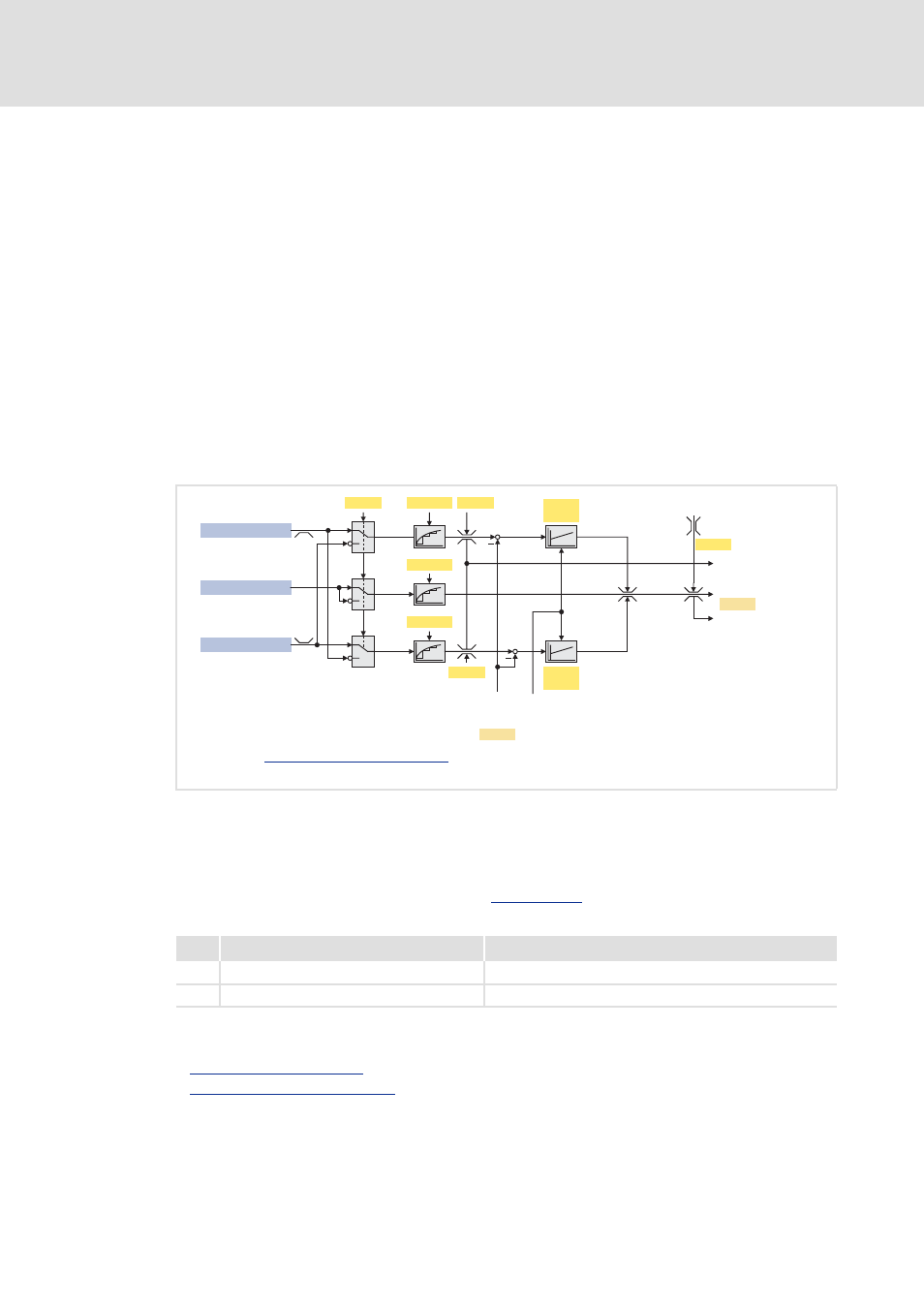
Signal flow
[9-3]
Signal flow - torque follower
Internal variables of the motor control (oscilloscope signals)
r
The red numbers specified in the signal flow represent internal variables of the motor
control, which can be recorded with the
for diagnostic and documentation
purposes.
See also:
System block "LS_MotorInterface"
p
Signal from
Signal flow - encoder evaluation
MI_... = Input/output signals of the motor interface
1
1
0
0
MI_bSpeedSetpointLimited
MI_bTorqueSetpointLimited
MI_dnTorqueSetpoint_n
C00776
C02527
TF_dnSpeedHighLimit_n
TF_dnSpeedLowLimit_n
1
0
TF_dnTorqueSet_n
C02550/2
C02550/3
MI_dnSpeedCtrlAdapt_n
LS_MotorInterface
C02550/2
C00909
C00070
C00909
0
0
MI_dnTorqueLimit_n
0
1
C02559
(1)
(2)
C00772
Vp
Tn
C00071
C00070 Vp
Tn
C00071
Interpolator
Interpolator
Speed controller 2
Interpolator
Speed controller 1
Motor speed
Encoder evaluation
No. Variable or the motor control
Meaning
(1)
Speed.dnSpeedSetpoint
Speed setpoint
(2)
Speed.dnActualMotorSpeed
Current motor speed