9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 296
9400 HighLine | Parameter setting & configuration
TAs for interconnection via electrical shaft
Introduction | Application examples
296
Firmware 1.37 - 09/2006
L
In case of the relative synchronism with mark synchronisation, there is a position reference
between tool and web, which occurs in each register. For this, a slight correction is
superimposed to the synchronous motion with regard to the web. Such applications are,
for instance, printing machines.
For the mark synchronisation in particular the register r (the cycle of the guiding angle)
and the distance of the sensor s from the home position of the tool (distances a
2
and a
3
)
are relevant.
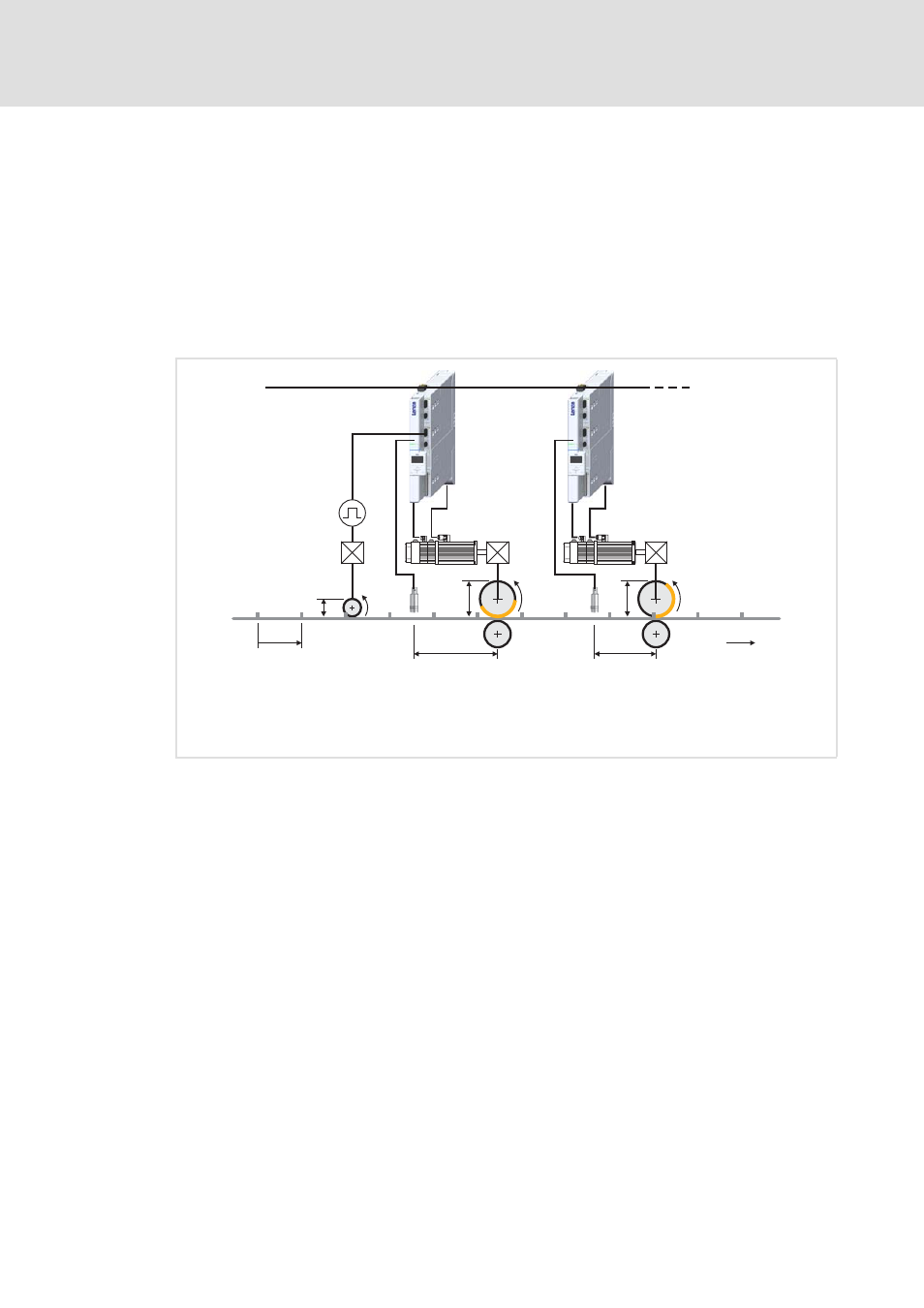
Relative synchronism with mark synchronisation and real master
[12-8] Relative synchronism with real master (track)
n
Real master/slave 1 (digital frequency extension module required)
o
Slave 2
p
Electrical shaft, implemented here via system bus (CAN).
q
Register (cycle of guiding angle/guiding angle)
r
Sensor for mark synchronisation
i
Slave
d
v
d
v
R1
R3
1
3
i
1
3
System bus
v
i
Master/Slave
d
v
R2
2
2
a
2
a
3