6 speed/acceleration override, Speed/acceleration override (c 399), 9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 399
L
Firmware 1.37 - 09/2006
399
9400 HighLine | Parameter setting & configuration
TAs for positioning tasks
TA "Multi-purpose positioning" | Speed/acceleration override
13.2.6
Speed/acceleration override
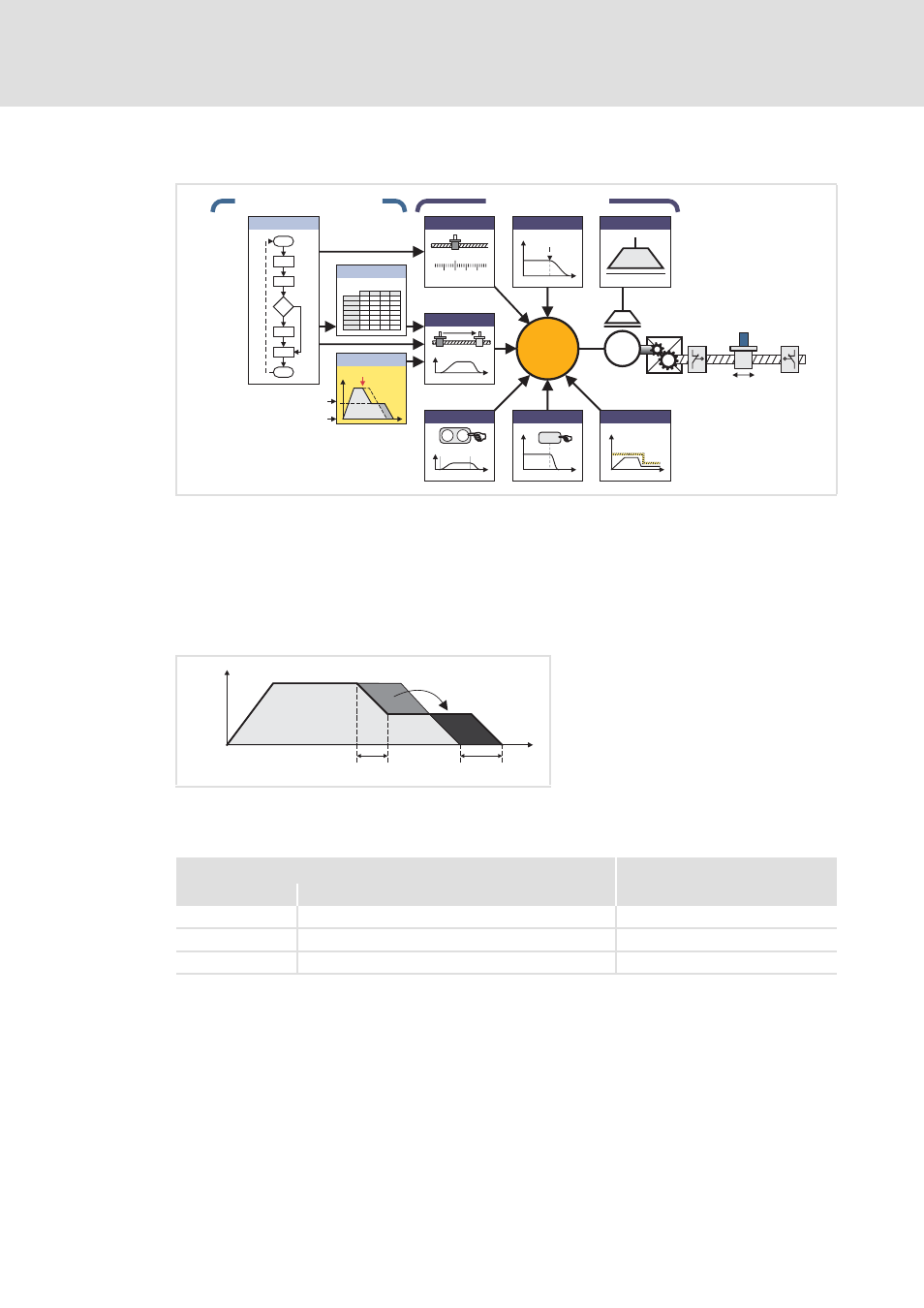
[13-11] Speed/acceleration override (schematic diagram)
"Override" is the change of profile parameters and their acceptance during the positioning
process.
In this case the travel profile is adapted accordingly so that if the speed is changed during
the positioning process ("speed override"), the specified target position is still positioned
exactly.
[13-12] Override (here: Speed override)
r
Parameter setting: Tab Application parameter Dialog level Overview LS_Positioner
AIN1
PositionerTable
Profiles
Multi-purpose positioning
Override
Enable
AIN2
Speed override
Acceleration override
Sequencer
LS_ManualJog
n
t
и
з
LS_Brake
n
t
LS_Limiter
n
t
LS_Quickstop
STOP
n
t
LS_Stop
internal
status machine
Status
machine
(basic drive
functions)
Basic drive functions
M
0
-100
100 200
LS_Homing
n
t
LS_Positioner
n
The speed is reduced during the positioning
process.
o
To reach the defined position, the missing
surface must be "attached" to the profile.
p
When the speed is reduced the positioning
process takes a longer time (Δt).
Dt
v [m/s]
t [s]
Control/setpoint inputs of the function
Signal configuration
Lenze setting
Control/setpoint input
(Multiplexer parameters)
C03013 Activate override
C03185/5
AIn 1 Speed override
C03186/1
AIn 2 Acceleration override
C03186/2