10 select switching frequency, Select switching frequency, C 79) – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 79: 9400 highline | parameter setting & configuration
L
Firmware 1.37 - 09/2006
79
9400 HighLine | Parameter setting & configuration
Motor interface
Initial commissioning | Select switching frequency
5.1.10
Select switching frequency
The controller uses a pulse-width modulation to generate the controller output voltage.
The chopper frequency is used to change the control factor of the pulse-width modulation.
r
Since the control factor is determined by the current controller, the chopper frequency
also limits the response of the current controller: the current controller updates the
output voltage only once per switching period.
r
Due to the limited response of the current controller, the current ripple and the torque
ripple increase with decreasing chopper frequency.
Reduced switching losses through chopper frequency reduction
The advantage of a chopper frequency reduction are the reduced switching losses in the
controller, which are monitored by means of an I x evaluation.
r
A reduced chopper frequency therefore enables a bigger current-time area at the
output than it would be the case with a higher chopper frequency. However, depending
on the process, you always have to make a compromise between the torque ripple and
the output power.
O
Tip!
The controller load (I x t) during the last 180 seconds is indicated under
.
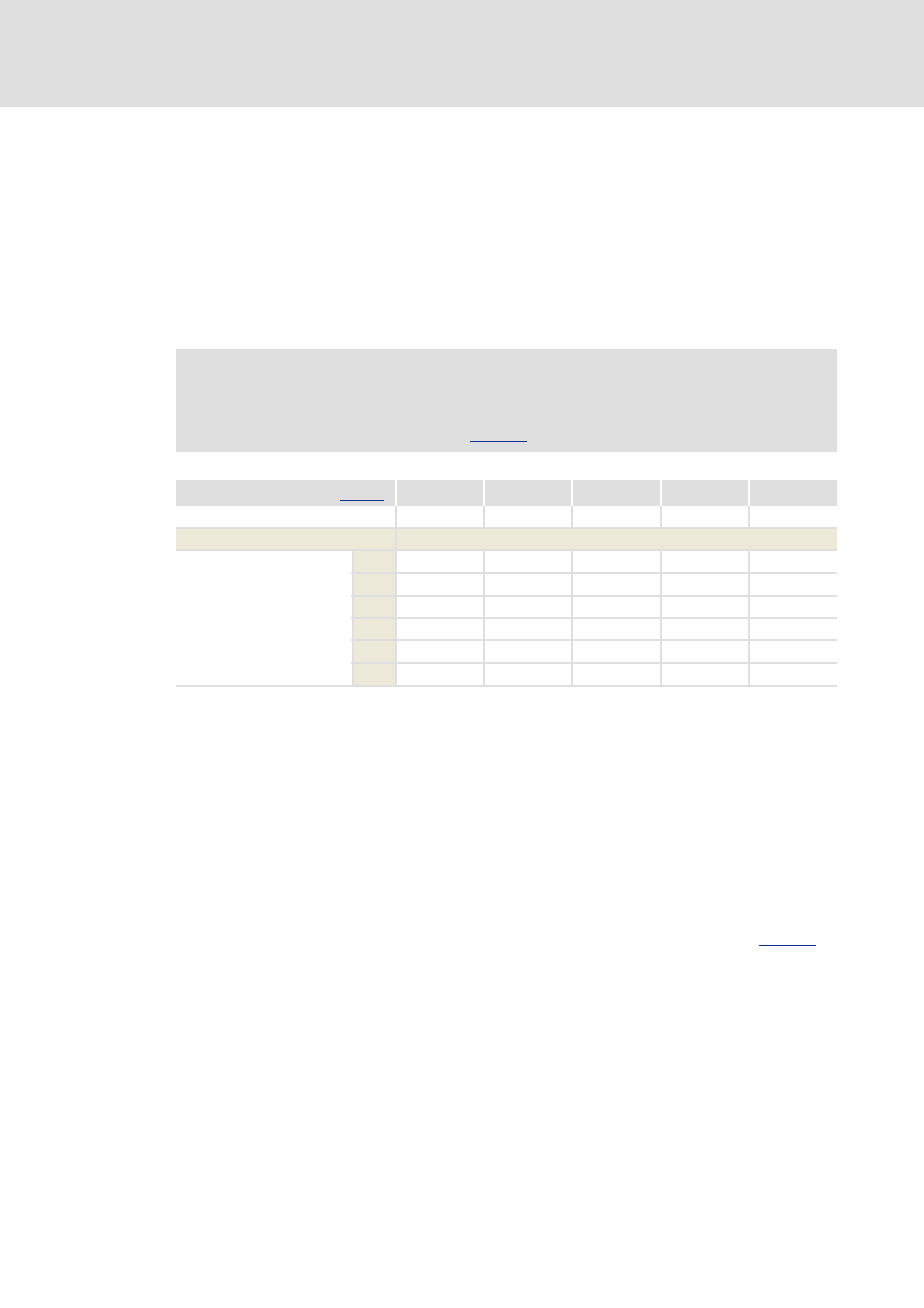
Note!
The maximum output frequency of the controller is limited to 1/8 of the
switching frequency selected in
Switching frequency (
1 kHz
2 kHz
4 kHz
8 kHz
16 kHz
Maximum output frequency:
125 Hz
250 Hz
500 Hz
1 kHz
2 kHz
Motor - number of pole pairs:
Maximum synchronous motor speed [rpm]
1
7500
15000
30000
60000
120000
2
3750
7500
15000
30000
60000
3
2500
5000
10000
20000
40000
4
1875
3750
7500
15000
30000
5
1500
3000
6000
12000
24000
6
1250
2500
5000
10000
20000