4 program flow, Program flow (c 378), 9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 378
9400 HighLine | Parameter setting & configuration
TAs for positioning tasks
TA "Multi-purpose positioning" | Program flow
378
Firmware 1.37 - 09/2006
L
13.2.4
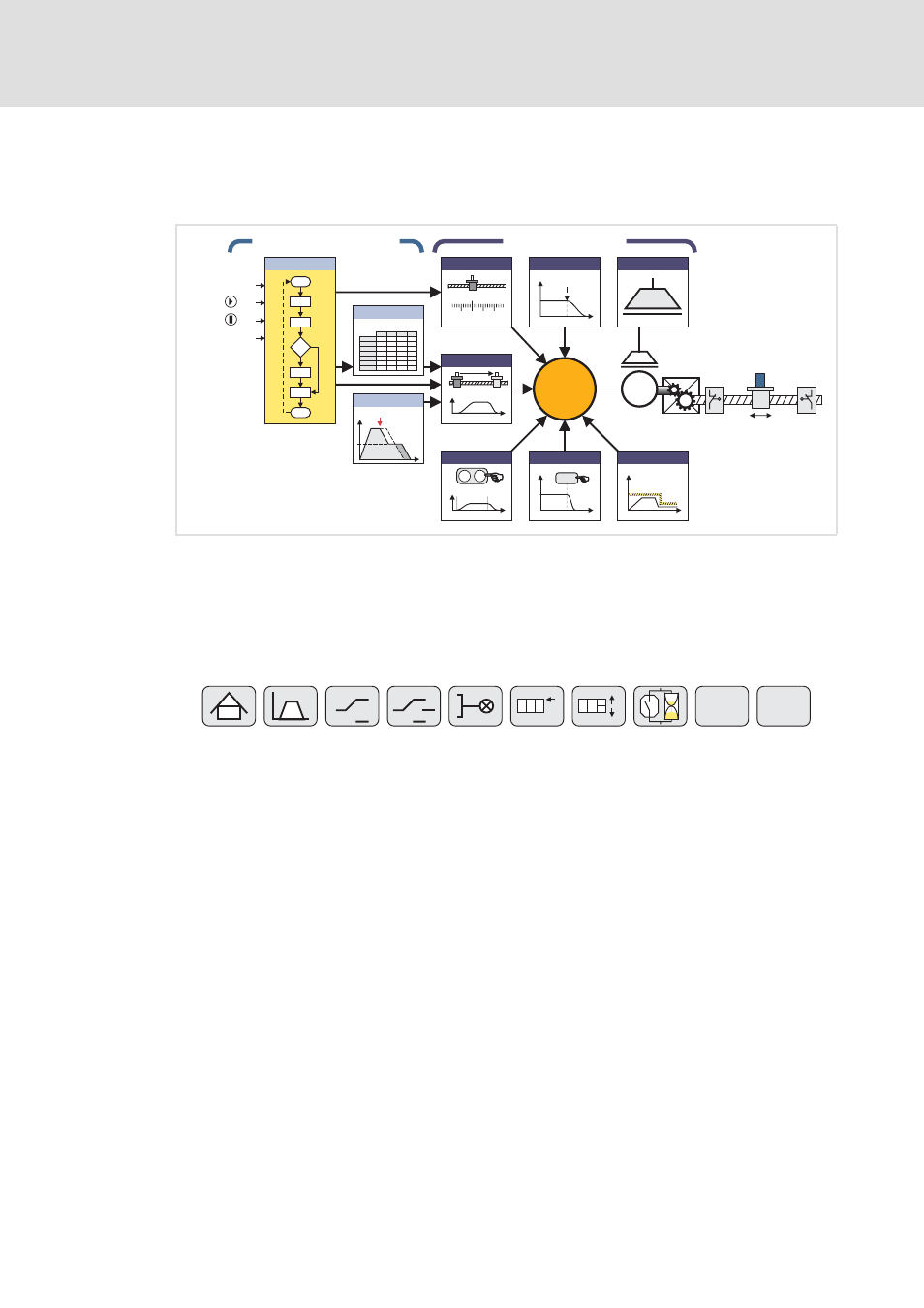
Program flow
The program flow of the multi-purpose positioning is selected according to a sequence
table which can contain up to 100 references to "actions".
[13-4] Sequence table (schematic diagram)
What is an action?
r
An action comprises a clear functionality which is described with a few parameters.
r
Different action types are available which serve to implement, for instance, program
branching, switching operations, waiting times and counters.
r
Before every action type a defined number of actions is available which can be
individually parameterised. The parameters of the actions of the same type only differ
in the subcode.
r
An action can be used in several steps if always exactly the same task is to be carried
out.
r
After an action has been processed, the action in the next step of the sequence table is
automatically processed unless it is jumped to another step in the sequence table due
to a branch.
r
One action can be maximally processed per computing cycle.
PositionerTable
Profiles
Multi-purpose positioning
Override
Enable
Sequencer
LS_ManualJog
n
t
и
з
LS_Brake
n
t
LS_Limiter
n
t
LS_Quickstop
STOP
n
t
LS_Stop
internal
status machine
Status
machine
(basic drive
functions)
Basic drive functions
M
0
-100
100 200
LS_Homing
n
t
LS_Positioner
DI7
DI6
DI5
Reset
Sequencer
input 8
DI8
1
n
2
0
1
0
Set
0 0
1
Standby
End
3
4
2