9400 highline | parameter setting & configuration – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 163
L
Firmware 1.37 - 09/2006
163
9400 HighLine | Parameter setting & configuration
Basic drive functions
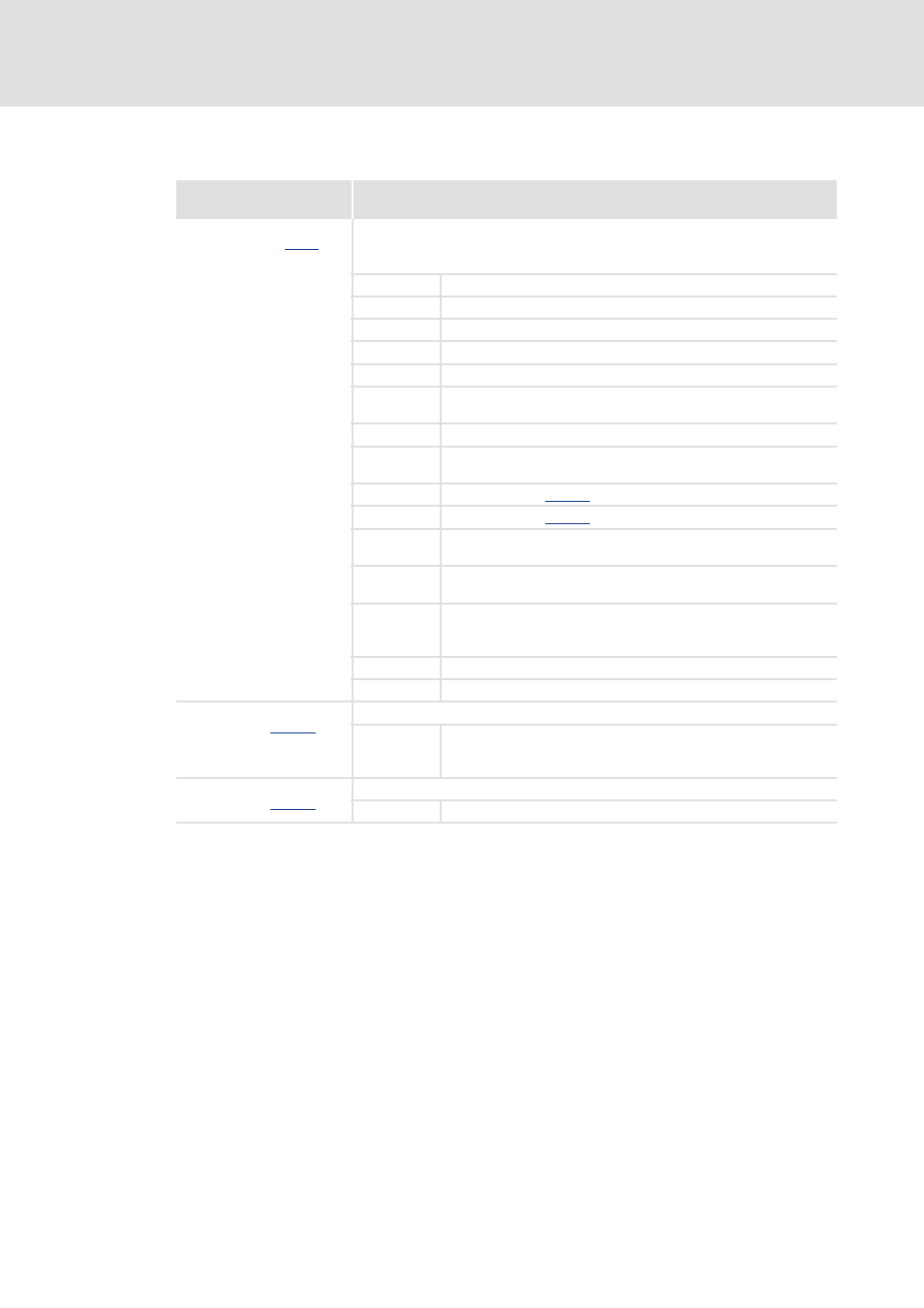
Manual jog | System block "LS_ManualJog"
Outputs
Identifier
DIS code | data type
Value/meaning
MAN_dnState
| DINT
Status (bit-coded)
• When the basic function is not enabled, all bits are set to "0".
• Bits which are not listed are not assigned with a status (always "0").
Bit 1 Manual jog active
Bit 2 Manual jog is completed.
Bit 3 Acceleration/deceleration phase is active.
Bit 5 CCW rotation is active.
Bit 15 Error in basic function active (group signal).
Bit 16 Stop by simultaneous selection of negative direction and retraction
from limit switch.
Bit 17 Stop by simultaneous selection of positive and negative direction.
Bit 18 Stop by simultaneous selection of positive direction and retraction
from limit switch.
Bit 20 Manual speed 2 (
Bit 21 Manual speed 1 (
Bit 22 Stop by selecting positive direction and simultaneous activation of
the positive software limit position or the positive limit switch.
Bit 23 Stop by selecting negative direction and simultaneous activation of
the negative software limit position or the negative limit switch.
Bit 24 General abort process (ramp-down of the speed setpoint)
• Takes place e.g. when a manual direction initiator is let go or due
to an impermissible status (see bit 16, 17, 18, 22, 23).
Bit 25 Stopping is active.
Bit 30 Profile generation error.
MAN_bEnabled
| BOOL
Status output "Basic function is enabled"
TRUE Manual jog via the control inputs is possible.
• The enable input MAN_bEnable is set to TRUE and the controller
is in the function state "Manual jog active".
MAN_bActive
| BOOL
Status output "Basic function is active"
TRUE Manual jog is active (the drive axis is moving).