5 parameterise motor encoder, Parameterise motor encoder, C 70) – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 70: 9400 highline | parameter setting & configuration, Danger
9400 HighLine | Parameter setting & configuration
Motor interface
Initial commissioning | Parameterise motor encoder
70
Firmware 1.37 - 09/2006
L
5.1.5
Parameterise motor encoder
O
Tip!
Detailed information on the encoder evaluation and on the use of a separate
position encoder can be found in the following main chapter "
r
The motor encoder can also be parameterised in the »Engineer« on the Application
parameter tab in the dialog level OverviewMotor.
r
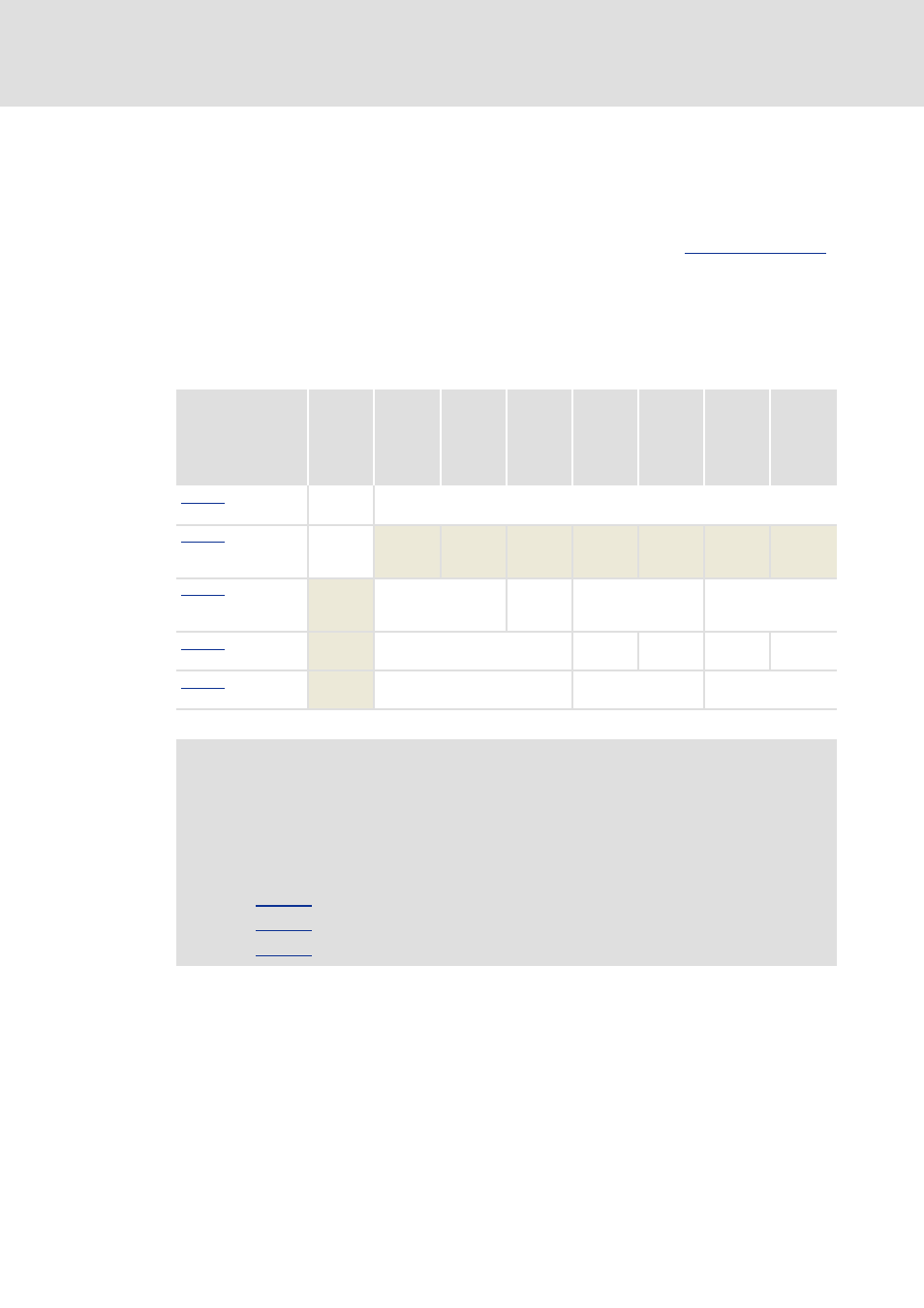
The following table shows the required settings for different encoder types:
Encoder type: Resolver
Tamagawa
CDD50
ITD21
ITD22
SCS70
SCM70
SRS50
SRM50
ECN1313
EQN1325
EQI1329
Motor type:
MCS
MCA
MDxKS
MDXMA
MCA
MDFQA
LMR
MDFQA
LMR
MDxKS
MCS
MCA
MCS
MCA
MCS
MCA
Motor encoder
0
Resolver
1
Encoder
Resolver - pole pair
number
1
-
-
-
-
-
-
-
Encoder - type
-
0
Incremental encoder
(TTL signal)
1
Sin/cos
encoder
2
Absolute value
encoder (Hiperface)
3
Absolute value
encoder (EnDat)
Encoder - PPR
-
2048
512
1024
2048
32
Encoder - voltage
-
5 V
8 V
5 V
Danger!
When using the encoder/resolver as motor encoder:
In case of an error as safe motor operation cannot be ensured anymore. Thus, the
"Fault" response (Lenze setting) should be set permanently for the (open circuit)
monitoring of the encoder/resolver!
•
: Response to open circuit of encoder
•
: Response to open circuit of resolver
•
: Response to communication error of encoder