9400 highline | parameter setting & configuration, Parameter reference attribute table – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 655
L
Firmware 1.37 - 09/2006
655
9400 HighLine | Parameter setting & configuration
Parameter reference
Attribute table
Max. acceleration to be shown
22034
5612
E
1
INTEGER_32
10000
;
Load reference speed
22033
5611
E
1
UNSIGNED_32
1000
;
Load reference torque
22032
5610
E
1
UNSIGNED_32
1000
;
DI_dnState
22028
560C
E
1
INTEGER_32
1
;
DI_bErrors
22027
560B
A
4
UNSIGNED_32
1
;
Drive interface: Signals
22026
560 A
A
15
UNSIGNED_32
1
;
Setpoint interpolation
22025
5609
A
3
UNSIGNED_32
1
;
;
Position setpoint
22023
5607
E
1
INTEGER_32
10000
;
Position controller gain
22022
5606
E
1
UNSIGNED_32
100
;
;
Integral-actoin time of position
controller
22021
5605
E
1
UNSIGNED_32
1000
;
;
D component of position controller
22020
5604
E
1
UNSIGNED_32
1000
;
;
Pos. contr. limitation
22019
5603
E
1
INTEGER_32
10000
;
;
Motor pos. contr. output
22018
5602
E
1
INTEGER_32
10000
;
Pos. contr. output
22017
5601
E
1
INTEGER_32
10000
;
Internal torque limit
22016
5600
A
2
INTEGER_32
100
;
Motor interface messages
22015
55FF
E
1
UNSIGNED_32
1
;
Control mode
22008
55F8
E
1
UNSIGNED_32
1
;
Motor interface: % signals
22007
55F7
A
8
INTEGER_32
100
;
Motor interface.: Dig. signals
22006
55F6
A
11
UNSIGNED_32
1
;
Controller configuration
22005
55F5
E
1
UNSIGNED_32
1
;
;
;
Speed setpoint
22003
55F3
E
1
INTEGER_32
10000
;
Position setpoint
22002
55F2
E
1
INTEGER_32
10000
;
Actual speed value
22001
55F1
E
1
INTEGER_32
10000
;
Actual position
22000
55F0
E
1
INTEGER_32
10000
;
Following error
21999
55EF
E
1
INTEGER_32
10000
;
External actual position
21998
55EE
E
1
INTEGER_32
10000
;
Offset actual pos. value/setp.
21997
55ED
E
1
INTEGER_32
10000
;
Encoder eval.: Dig. signals
21996
55EC
A
3
UNSIGNED_32
1
;
Operating mode - brake
21995
55EB
E
1
UNSIGNED_32
1
;
;
;
Brake activation threshold
21994
55EA
E
1
INTEGER_32
1
;
;
Brake resp. to pulse inhibit
21993
55E9
E
1
UNSIGNED_32
1
;
;
Status input monitoring
21992
55E8
E
1
UNSIGNED_32
1
;
;
Brake control polarity
21990
55E6
E
1
UNSIGNED_32
1
;
;
Starting torque 1
21989
55E5
E
1
INTEGER_32
100
;
;
Starting torque 2
21988
55E4
E
1
INTEGER_32
100
;
;
Source of starting torque
21987
55E3
E
1
UNSIGNED_32
1
;
;
Brake closing time
21986
55E2
E
1
UNSIGNED_32
1
;
;
Brake opening time
21985
55E1
E
1
UNSIGNED_32
1
;
;
Waiting time - status monit.
21984
55E0
E
1
UNSIGNED_32
1
;
;
Waiting time - brake active.
21982
55DE
E
1
UNSIGNED_32
1000
;
;
Test torque
21981
55DD
E
1
INTEGER_32
100
;
;
Permissible angle of rotation
21980
55DC
E
1
INTEGER_32
1
;
;
Grinding speed
21979
55 db
E
1
INTEGER_32
1
;
;
Accel./decel. time - grinding
21978
55DA
E
1
UNSIGNED_32
1000
;
;
Grinding ON time
21977
55D9
E
1
UNSIGNED_32
10
;
;
Grinding OFF time
21976
55D8
E
1
UNSIGNED_32
10
;
;
BRK_dnState
21968
55D0
E
1
INTEGER_32
1
;
BRK_dnTorqueAdd_n
21967
55CF
E
1
INTEGER_32
100
;
Brake control: Dig. signals
21966
55CE
A
9
UNSIGNED_32
1
;
Deceleration time for stop
21965
55CD
E
1
UNSIGNED_32
1000
;
;
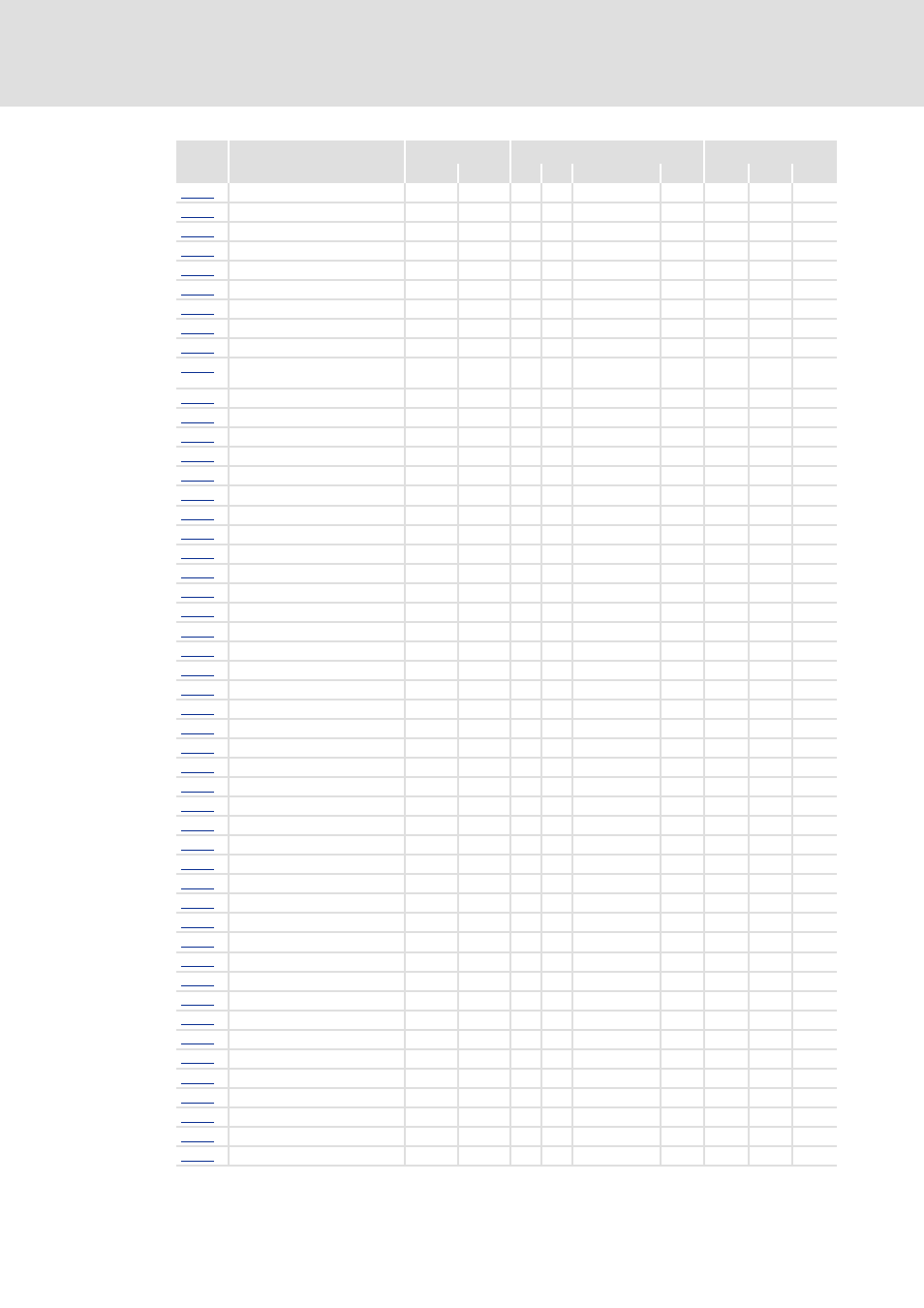
Code
Name
Index
Data
Access
dec
hex
DS
DA
DT
Factor
R
W
CINH