9400 highline | parameter setting & configuration, Motor interface system block "ls_motorinterface, Outputs – Lenze E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) User Manual
Page 105
L
Firmware 1.37 - 09/2006
105
9400 HighLine | Parameter setting & configuration
Motor interface
System block "LS_MotorInterface"
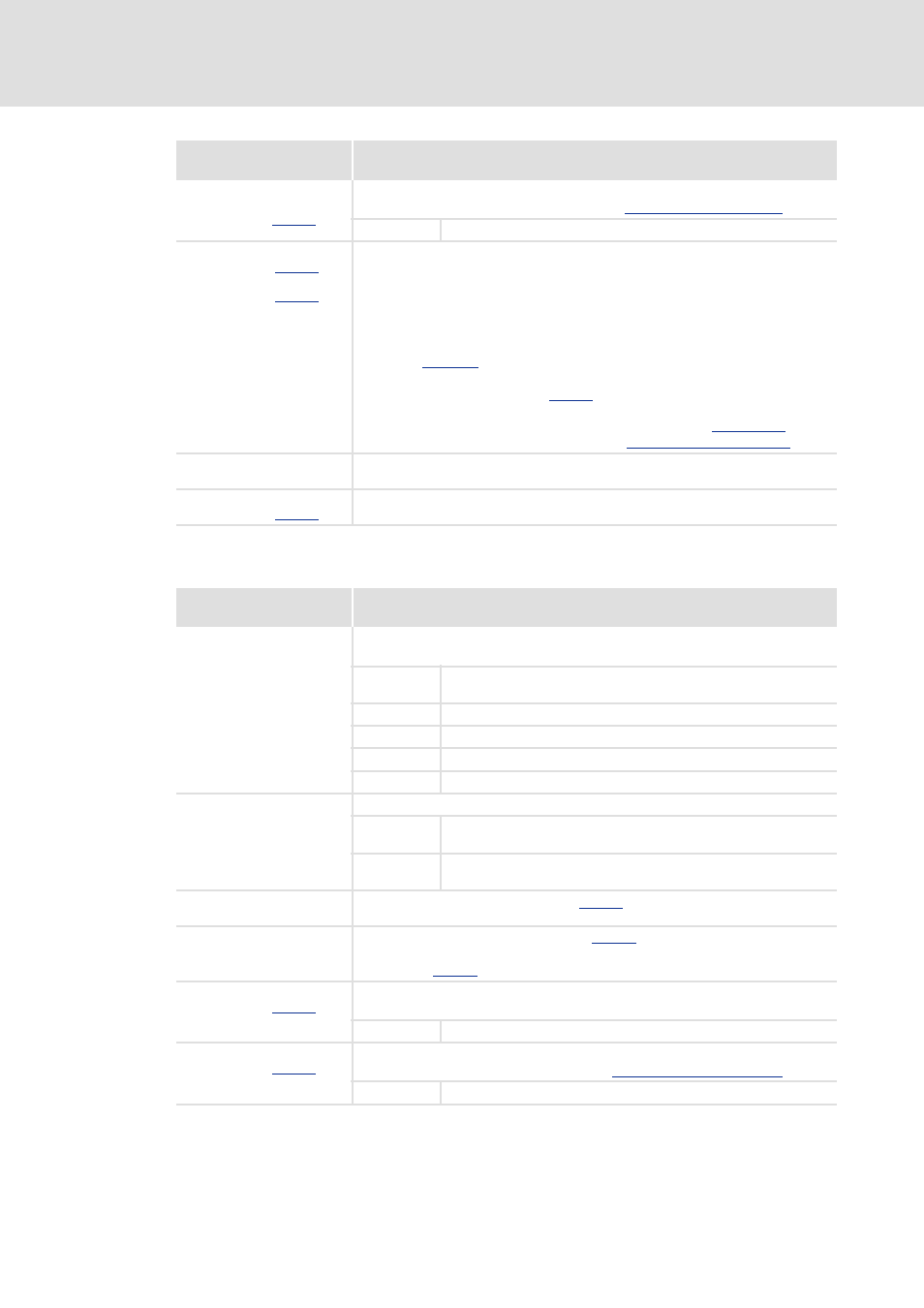
Outputs
MI_-
bResetSpeedCtrlIntegrator
| BOOL
Reset integral action component in the speed controller
Signal flow - speed follower (C 191)
TRUE Integral action component is reset to "0".
MI_dnTorqueHighLimit_n
| DINT
MI_dnTorqueLowLimit_n
| DINT
Upper/lower bipolar limit value for correcting variable of the speed controller and
total torque setpoint
• Via these both inputs you can select an external torque limitation.
–If the motor torque reaches the selected limits, the drive can no longer follow
the speed setpoint!
–If the torque limitation is active, the output MI_bTorqueSetpointLimited is set to
TRUE.
• 100 % ≡
• When both values overlap, the upper limit value has priority.
• The motor mounting position (
) defines the assignment to the limitation
inputs of the motor control.
• The internally effective torque limit values are displayed in
Signal flow - motor interface (C 95)
MI_dnReserved
DINT
Reserved input for future extensions
MI_dnFluxSetpoint_n
| DINT
Setpoint for the field controller
Output
DIS code | Data type
Value/meaning
MI_dwControlMode
DWORD
Active control structure of the motor control
• Displayed value is bit-coded:
Bit 1 Position control without feedback, external following error
calculation
Bit 2 Position control with encoder on the motor side
Bit 3 Position control with encoder on the load side
Bit 4 Speed control
Bit 5 Torque control
MI_-
bMotorOrientationInverse
BOOL
Parameterised motor mounting position
FALSE Motor mounting position in the same direction, setpoints are not
defined.
TRUE Motor mounting position in the opposite direction, setpoints are
reversed.
MI_dwReferenceSpeed
DWORD
Parameterised motor reference speed (
) in [rpm]
MI_dwReferenceTorque
DWORD
Reachable motor torque with I
max_device
• 1000 mNm ≡ 1 Nm
• Display in
in [Nm]
MI_bLimitationActive
| BOOL
Status signal "Internal limitation active"
• Group signal for all limitation messages.
TRUE One of the internal limitations is active.
MI_bPosCtrlLimited
| BOOL
Status signal "Phase/position controller in the limitation"
Signal flow - position follower (C 184)
TRUE The limitation of the phase and/or position controller is active.
Input
DIS code | Data type
Information/possible settings