IAI America XSEL-S User Manual
Page 60
Chapter 1 Specifications Check
1.2.3 XSEL-RXD/SXD Controller
Type
52
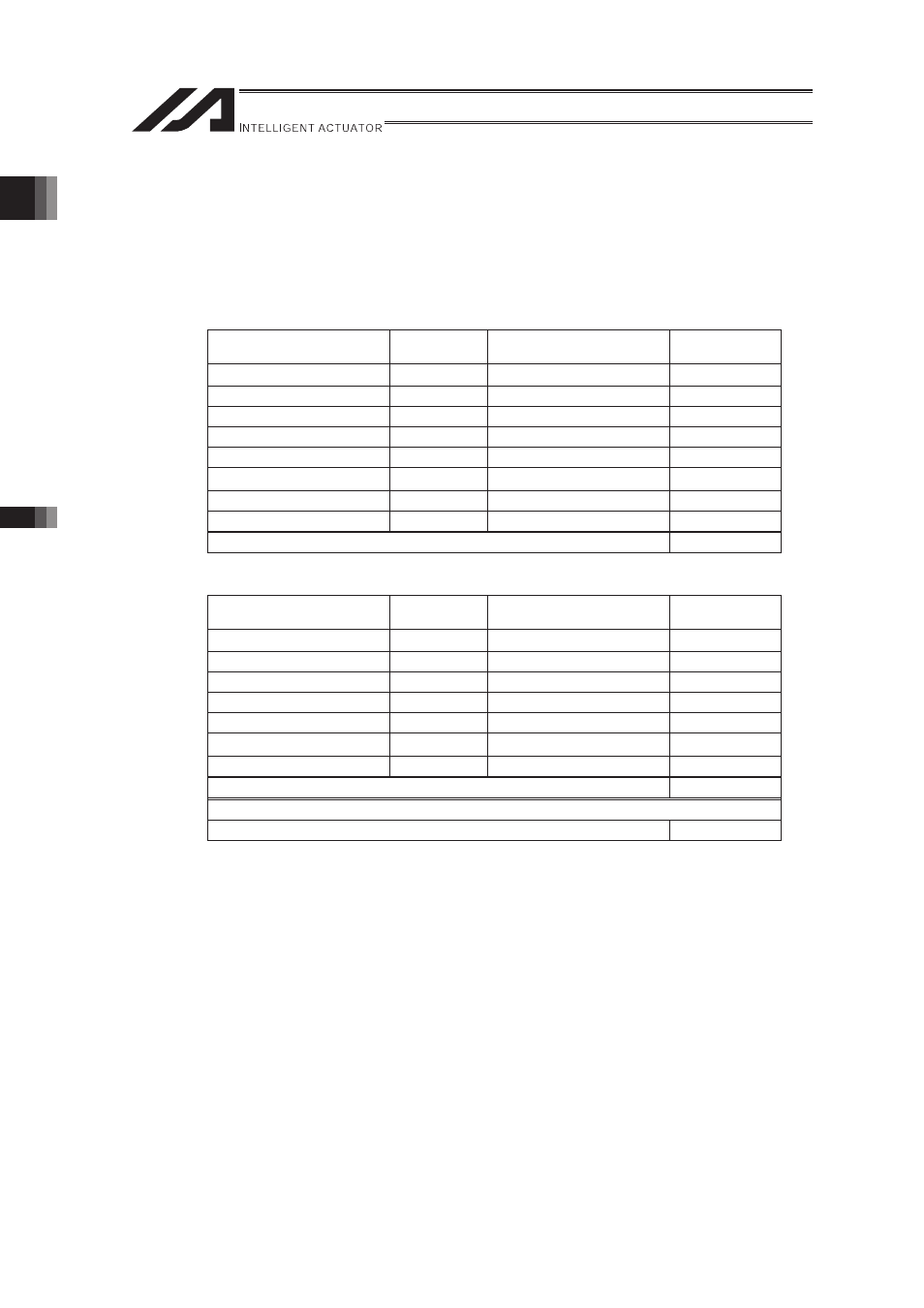
[Calculation Example]
Shown below is an example for how to calculate the power capacity and amount of heat
generation when the following actuators are used.
SCARA Robot: IX-NNN1505H (without brake)
IX-NNN2515H
Standard Type Controller �Option: PIO Board 1 sheet, Device Net�
Teaching Pendant (IAI Standard Type)�
�
1) Control Power Capacity�
Base Unit
Quantity
Power consumption
(Per Unit)
Total [VA]
Base Unit
�
31.4
31.4
Driver
4
6.26
25.06
Encoder
8
2.38 + 3.57
47.6
Fan Unit
6
5.71
34.26
PIO Board
1
5.95
5.95
Device Net
�
1.98
1.98
Teaching pendant
1
3.57
3.57
Brake
1
0.28
0.28
Totalizer
150.1
�
2) Heat Generation of Control System�
Base Unit
Quantity
Power consumption
(Per Unit)
Total [VA]
Base Unit
�
31.4
31.4
Driver
4
6.26
25.04
Encoder
8
2.38
19.04
Fan Unit
6
5.71
34.26
PIO Board
1
5.95 + 14.52
20.47
Device Net
�
1.98 + 3.43
5.41
Brake
1
2.78
2.78
Totalizer
138.4
Heat Generation [W] = Totalizer [VA] × 0.7(Efficiency)×0.6(Power Factor)
58.13
�
3) I/O (PIO board) Power Capacity (24V DC)�
14.52 × 1 = 14.52 [VA]
4) Brake Power Capacity (24V DC)
(2.5 + 1) × 1 = 7.0 [VA]
5) Motor Power Capacity
SCARA Axes IX-NNN1505H: 216.3[VA]
SCARA Axes IX-NNN2515H: 1863.1 [VA]
216.3 +1863.1 = 2079.4 [VA]
6) Motor Power Supply Heat Generation
8.13 + 44.8 = 52.93 [W]
7) Rated Power Capacity =
1) Control Power Capacity + 5) Motor Power Capacity = 150.1+ 2079.4 = 2229.5 [VA]
8) Heat Generation =
2) Heat Generation of Control System + 6) Motor Power Supply Heat Generation = 58.13
+ 52.93 = 111.06 [W]