IAI America XSEL-S User Manual
Page 353
Chapter 6 Parameter
6.3.1 For XSEL-R/S
345
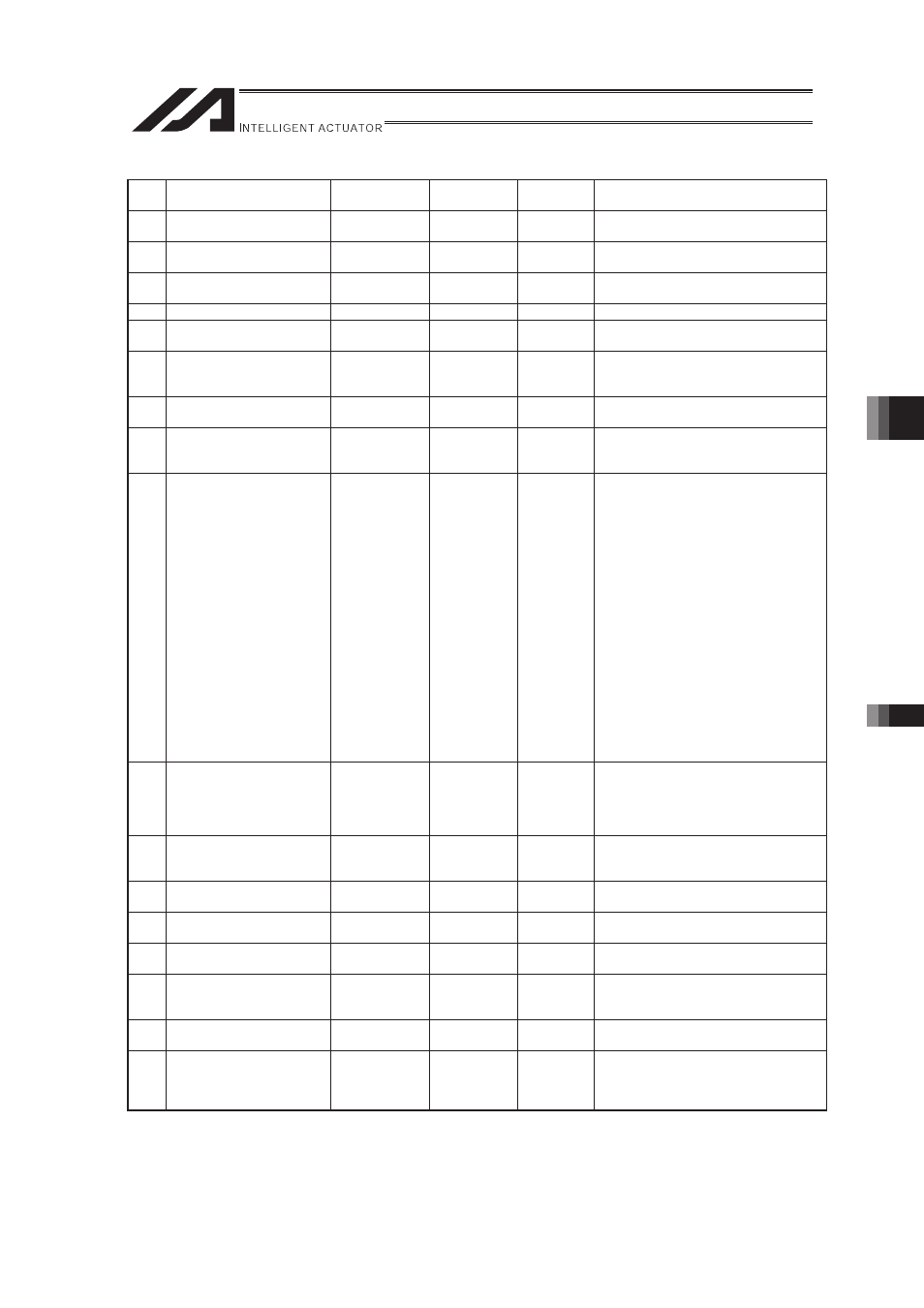
Axis-Specific Parameters (XSEL-R/S)
No.
Parameter name
Default value
(reference)
Input range
Unit
Remarks
13 SIO and PIO Home-Return
Order
0
0 to 16
Executed from smaller
14 Home position check
sensor input polarity
0
0 to 2
0: Not to Use, 1: contact a, 2: contact b
15 Overrun Sensor Input
Polarity
0
0 to 2
0: Not to Use, 1: contact a, 2: contact b
16 Creep Sensor Input Polarity
0
0 to 2
0: Not to Use, 1: contact a, 2: contact b
17 Initial Home Sensor Escape
Velocity in Home-Return
10
1 to 100
mm/sec
18 Creep Velocity in
Home-Return
100
1 to 500
mm/sec
End search velocity in creep sensor
non-detecting area when using creep
sensor
19 End Search Velocity in
Home-Return
20
1 to 100
mm/sec
20 Z-Phase Search Velocity in
Home-Return
3
1 to 10
mm/sec
Attention needed due to limitations
caused by number of lead encoder
pulses
21 Offset Movement Amount in
Home-Return
1000
-99999999
to 99999999
0.001mm
Offset movement amount from the
Z-phase ideal position
(Positive value = direction to go against
the end) (Refer to Each Axis Parameter
No. 76.)
* Caution for ABS Encoder
There is a concern that the coordinate
may get misaligned for the amount of
a Z-phase pulse because it gets to the
servo lock condition on the Z-phase at
ABS reset if a value around multiples
of a Z-phase distance integer
(including offset movement amount 0)
is set in this parameter.
Do not attempt to set a value around
multiples of a Z-phase distance
integer.
(Have an enough margin to the
amplitude of the servo system.)
* Set 0 for the wrist axis
22
Z-Phase Position Error
Check Allowable in
Home-Return
500
0 to
99999999
0.001mm
Minimum allowable actual distance
between an end (mech side or LS) and
Z-phase when rotary encoder
Z-phase search limit when linear
encoder
23 Number of Z-Phase in 1
Turn of Encoder
1
1 to 8
Only 1 is available to use when ABS
encoder. It is invalid when linear
encoder
24 Pressing Stop Confirmation
Time in Home-Return
700
1 to 5000
msec
Used for pressing confirmation in
home-return operation
25 Pressing Stop Confirmation
Time in Positioning
500
1 to 5000
msec
Used for pressing confirmation in PUSH
Command
26 Reserved by the system
(change is prohibited)
0
27 Motor Max. Speed
5000
1 to 99999
Value in rpm when rotary encoder,
Value in mm/sec when linear encoder
(Change Prohibited)
28 Maximum Operation Speed
for Each Axis
1000
1 to 9999
mm/s
29 VLMX Speed
1000
1 to 9999
mm/s
Maximum operation speed of each axis
and the smaller in VLMX speed are
treated as the applicable axis maximum
speed in VLMX operation.