IAI America XSEL-S User Manual
Page 204
Chapter 4
Absolute Reset and
Absolute Battery
4.1.1 For PC Software
196
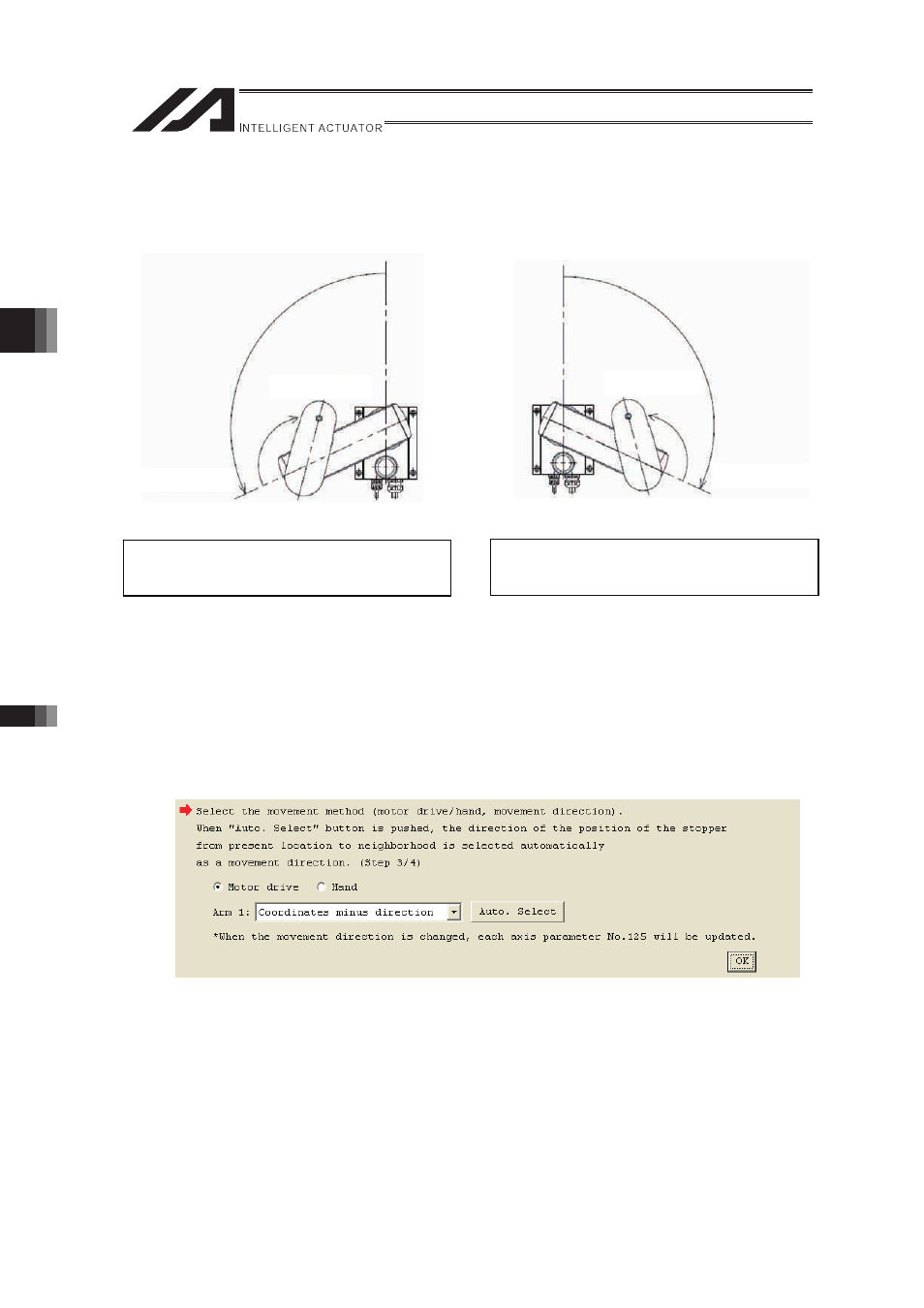
[Initial posture]
�
Arm1, Arm 2
Remove all the interferences of the peripheral devices, and set the posture to either of the
left arm system or the right arm system. It is set to right arm system when the unit is
shipped out.
Arm 2 =
Negative direction of coordinate
Arm 1 =
Positive direction of coordinate
Arm 1 =
Negative direction of coordinate
Arm 2 =
Positive direction of coordinate
For the position, put it apart from the stopper position for 10deg or more.
Setting it too close to the stopper, Error No. B0D “Push Stopper Operation Start Position
Error” may occur at operation.
4) Select the movement method. Make to select motor drive on the selection of motor
drive/hand. Change the movement direction if necessary. If clicking on “Auto. Select”
button, the direction of movement from the current position of the initial posture is
automatically selected. Once the selection is made, click on the “OK” button.
Initial posture of left arm system
Arm 1 = Positive direction of coordinate
Arm 2 = Negative direction of coordinate
Initial posture of right arm system (At the delivery)
Arm 1 = Negative direction of coordinate
Arm 2 = Positive direction of coordinate