IAI America XSEL-S User Manual
Page 283
Chapter 5 Special Functions
5.4 Multiple-Slider Near-Miss Detection (Collision Prevention) Function
275
5.4 Multiple-Slider Near-Miss Detection (Collision Prevention) Function
When multiple sliders are used, this function prevents jogging or positioning axes from
colliding with one other. The following parameters are set to detect near-miss situations
among multiple sliders.
Setting method
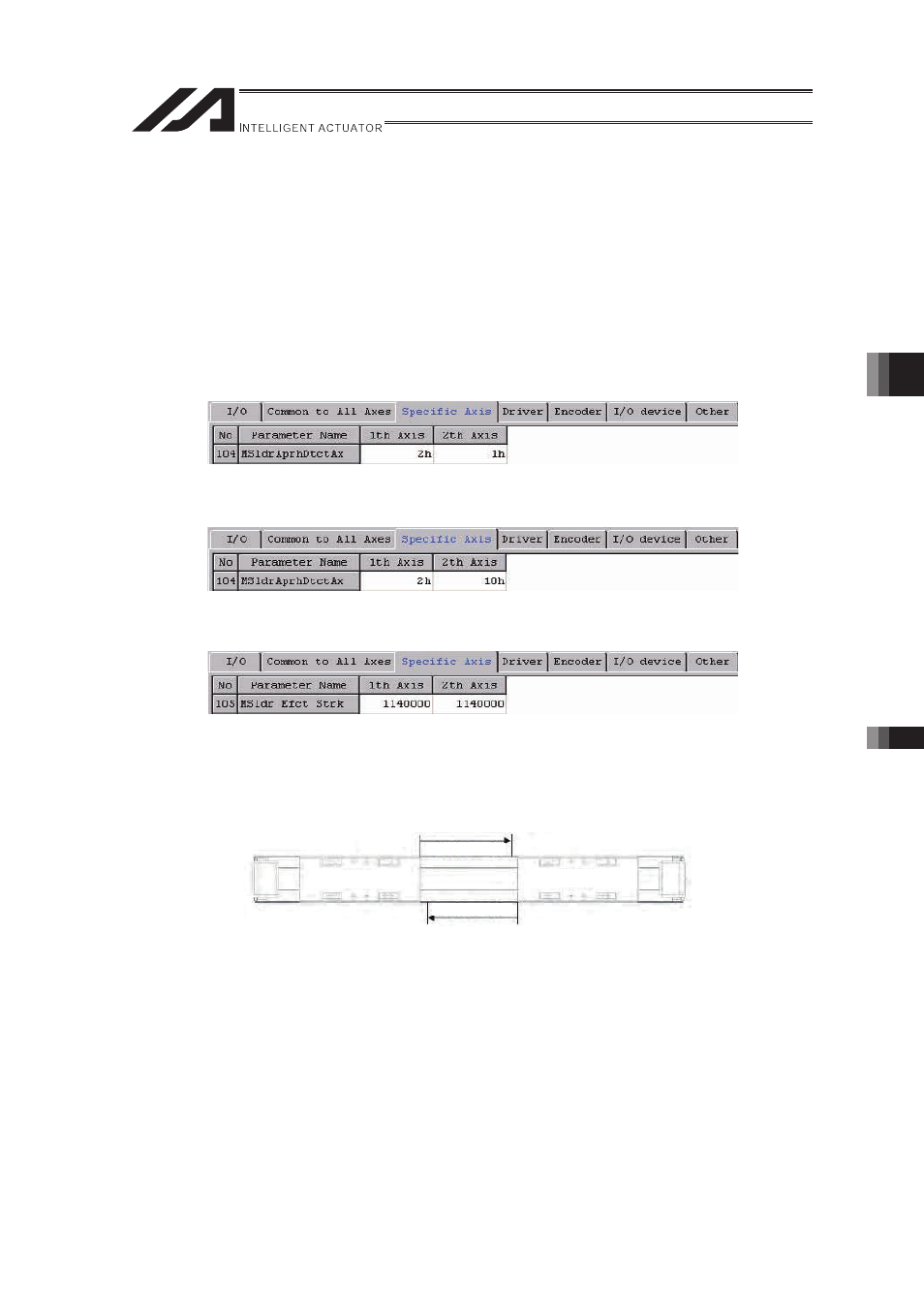
[1] Set the mating axis number for each axis in axis-specific parameter No. 104, “Target axis
specification for multiple-slider near-miss detection.”
Example 1: 2-axis controller
Set the mating axis number for each axis. (The example below assumes that
an interlocked slider exists on the positive side of the coordinate system of
the target axis)
Example 2: When an interlocked slider exists on the negative side of the coordinate
system of the target axis (Axis 2 is on the negative side)
[2] Set the effective stroke in axis-specific parameter No. 105, “Effective stroke of multiple
sliders.” (The example below assumes a stroke of 1140.)
(Note) The multiple-slider near-miss detection (collision prevention) function is enabled only
when coordinates of two target axes (mating axes) are confirmed. This function is
disabled if an encoder error is present or when home return is not yet completed on an
incremental-encoder controller.
�
�
�
�
�
�
�
�
After a near-miss situation is detected, the following errors will generate:
Error No. 422, “Multiple-slider command position near-miss error” (Emergency deceleration will be
triggered to stop the sliders, after which the servo will be turned OFF.)
Error No. 423, “Multiple-slider actual position near-miss error” (Emergency deceleration will be
triggered to stop the sliders, after which the servo will be turned OFF.)
(Note) Following a near-miss detection, pull the sliders out of their near-miss positions via jogging,
etc. (The sliders can be jogged in pull-out directions.)
Soft limit+
Soft limit-
Soft limit-
Soft limit+
Axis 1
(Stroke)
Axis 2
(Stroke)