2 parameters common to all axes, 1 for xsel-r/s – IAI America XSEL-S User Manual
Page 334
Chapter 6 Parameter
6.2 Parameters Common to
All
Axes
6.2.1 For XSEL-R/S
326
6.2
Parameters Common to All Axes
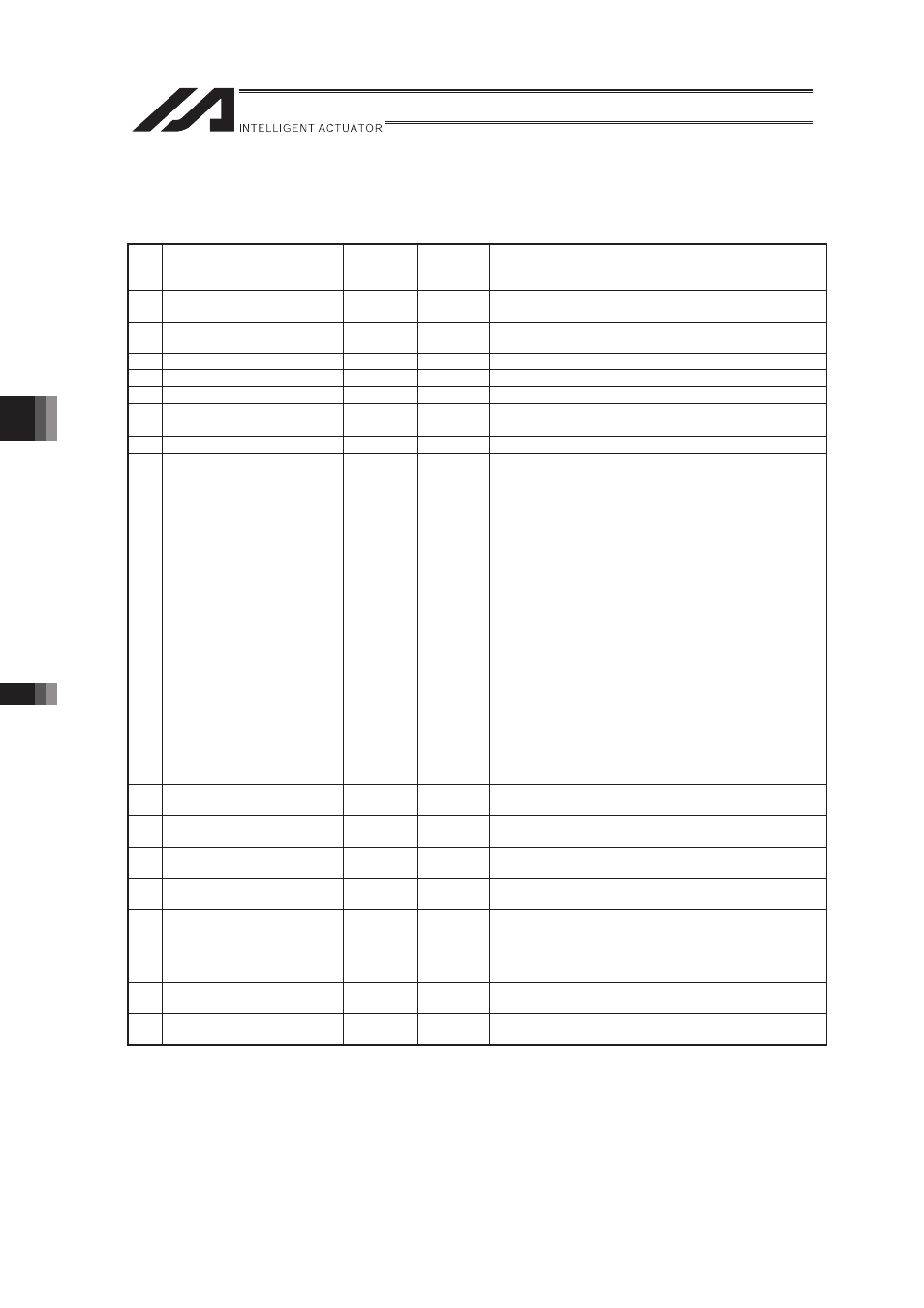
6.2.1 For XSEL-R/S
No.
Parameter name
Default
value
(reference)
Input range
Unit
Remarks
1 Valid axis pattern
111111B
00B to
11111111B
OFF Bit: Setting of driver not mounted
2 Default override
100
1 to 100
Used if not specified in program.
(Invalid for SIO operation)
3 (For expansion)
0
4 (For expansion)
0
5 (For expansion)
0
6 (For expansion)
0
7 (For expansion)
0
8 (For expansion)
0
9
Enable switch (Deadman
switch/Safety gate) effective
physical axis pattern
11111111B
00B to
11111111B
It does not get influence of ASE Command. (For
all axes (= basic), make sure to indicate 11111111.
The enable switch gets involved in the drive
source cutoff factor only when it is set to 11111111,
and in cases other than 11111111, drive source
cutoff would not be conducted, and only the
indicated axis servo will be turned off. (“enb” not
displayed on 7-segment display windows)
* When “Other Parameter No. 11 Recovery Type
at Enable Switch (Dead man’s switch and
safety gate) Open” = 1 (Reset Recovery
Required), the setting will be identified as the
indication of all axes.
* An axis with no motor drive power part built in
this controller or that with the drive source cutoff
circuit not under the control of this controller
cannot make a drive source cutoff.
* For the option (special order) type, the priority is
given to the option (special order) specifications
such as the dead man’s switch effective physical
axis, drive source cutoff, servo-off and the display
of 7-segment display windows.
10 Reserved by the system
(change is prohibited).
0
11 Default acceleration
30
1 to 200
0.01 G Used if not specified in position data, program or
SIO message, etc.
12 Default deceleration
30
1 to 200
0.01 G Used if not specified in position data, program or
SIO message, etc.
13 Default speed
30
1 to 250
mm/s Used if not specified in SIO message or position
data, when movement is to be continued, etc.
14 Valid selection when operation
position data deceleration is 0
0
0 to 5
0: “Deceleration = Acceleration” when the
deceleration in the operation position data is
“0”
1: “Deceleration = 0” when the deceleration in
the operation position data is “0”
15 Maximum JOG speed at home
return incomplete
30
1 to 250
mm/s
16 Reserved by the system
(change is prohibited).
0