IAI America XSEL-S User Manual
Page 34
26
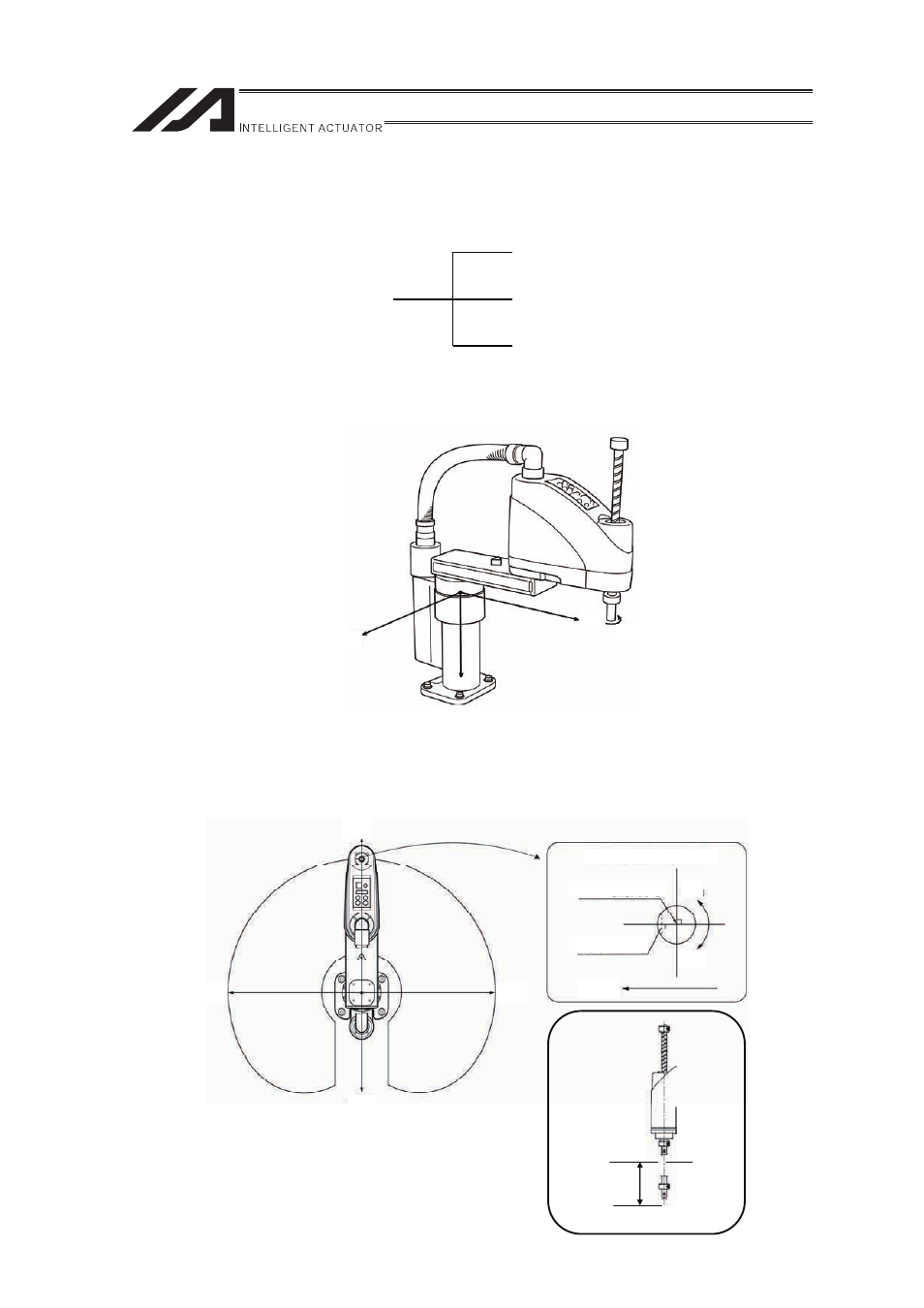
(8) Horizontal Articulated (SCARA) Robot
There are three types of coordinate systems, base coordinate system, work coordinate system
and tool coordinate system, in Horizontal Articulated (SCARA) Robot.
[Base Coordinate System (= Work Coordinate System No.0)]
It is the three-dimensional orthogonal coordinates + rotational axis coordinates defined in the
robot at the delivery.
Work Coordinate System No. 0 (work coordinate offset 0) = Base coordinate system.
Xb
Yb
Rb
Zb
The origin of X and Y axes is the center of the base (center of 1
st
arm rotation).
The origin of Z-axis is the top side of Z-axis effective stroke.
The origin of R-axis is the point where the D-cut surface faces –Xb direction.
In the base coordinate system, X-axis is expressed as Xb, Y-axis as Yb, Z-axis as Zb and
R-axis as Rb.
Coordinates
Base Coordinate System
Work Coordinate System
Tool Coordinate System
Zb=0
-Zb
+Zb
Stroke
Z Axis Position
R Axis
D-shaped Surface
+Yb
-Yb
-Xb
+Xb
+Rb
-Rb
-Xb
R-Axis Position from Top View
Center of Tool
Attachment Surface