IAI America XSEL-S User Manual
Page 335
Chapter 6 Parameter
6.2.1 For XSEL-R/S
327
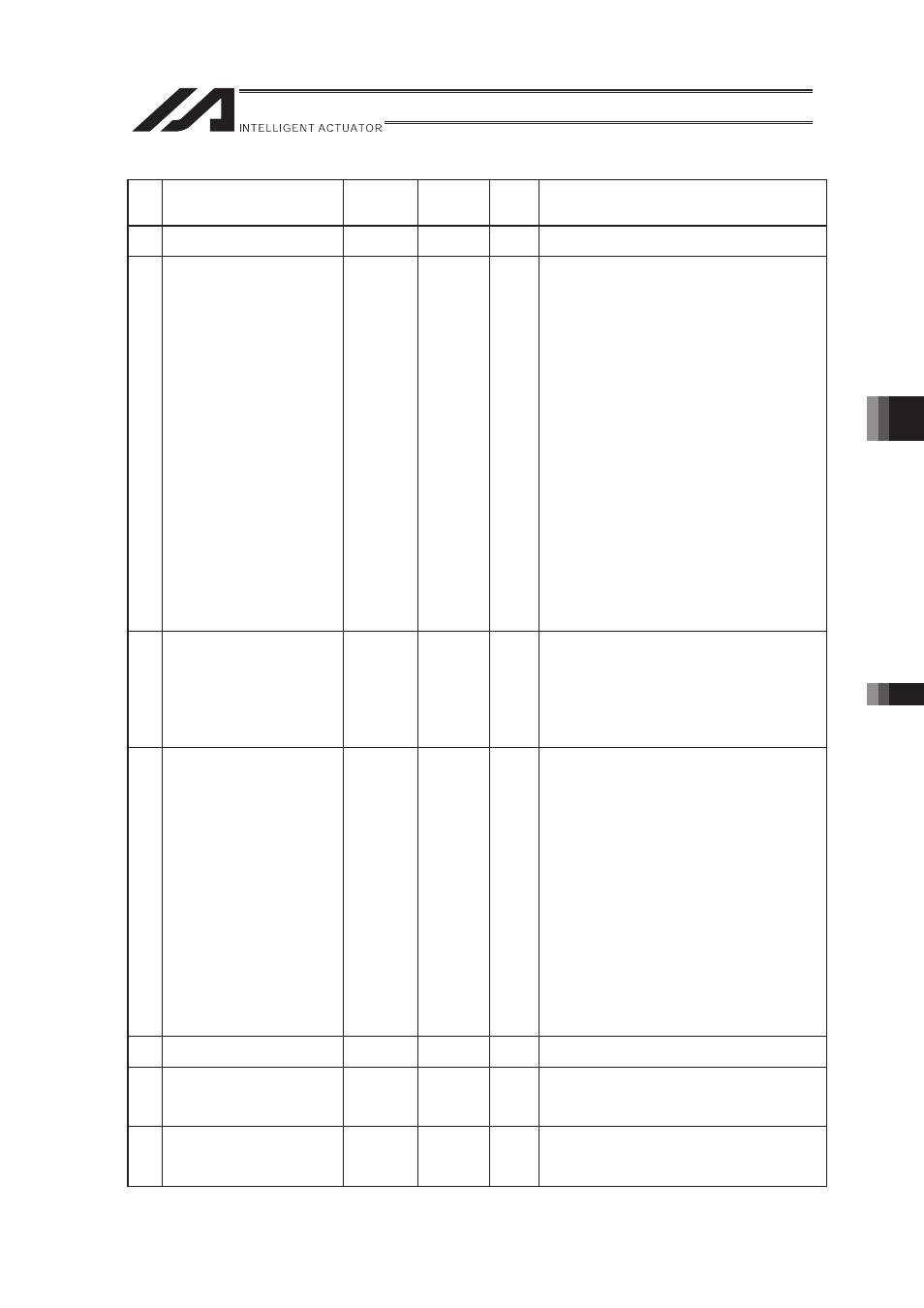
Parameters Common to All Axes (XSEL-R/S)
No.
Parameter name
Default
value
(reference)
Input range
Unit
Remarks
17 Reserved by the system
(change is prohibited).
0
18
Maximum Operation
Acceleration/Deceleration
Check Timing
1
0 to 1
0: Check at input
PC/TP checks the input in All Axes Parameter
No. 22 “Maximum Acceleration” and “No. 23
“Maximum Deceleration”.
1: Check at operation
*If it is set to the check at operation, the
distributed acceleration/deceleration (CP) of the
indicated acceleration and deceleration or the
indicated acceleration and deceleration (PTP)
are checked and compared with the maximum
parameter of the operational acceleration and
deceleration of ach axis, and clamped to the
available acceleration and deceleration.
Therefore, the maximum performance of the
system corresponding to the operation
command can be obtained, but a complete
check cannot be made at the input (because the
start position of command or operation is not
constant). Also, in CP, the
acceleration/deceleration speed varies
depending on the operation start position if CP
is conducted from unspecific position (in such
cases as the first point movement) since the
distributed acceleration/deceleration speed
varies depending on the operation start position.
19
Process Type at Constant
(non-pressing) Torque Limit
Excess
0
0 to 9
0: Operation Cancel Level Errors
(Recommended)
1: Cancel operation (SEL command output is off)
* Priority on overload driver error
* Operation cancel level error to be issued no
matter of this setting when Each Axis
Parameter No. 167 is set to a number other
than 0 (indicated to slave operation)
20
Maximum Operation
Acceleration/Deceleration
Check Timing
1
0 to 1
0: Check at input 1: Check at operation
* For the check at operation, distribution speed
(CP) of the indicated velocity or the specified
velocity (PTP) and the maximum operation
speed parameter of each axis are to be
compared and checked, and get clamped to the
available velocity.
Therefore, the maximum performance of the
system corresponding to the operation
command can be obtained, but a complete
check cannot be made at the input (because
the start position of command or operation is
not constant).
Also, at CP, the distribution speed changes
depending on the operation start point,
therefore, in case CP is conducted from an
unspecified position (such as the position
movement at the first), the speed changes
depending on the operation start position.
21 Maximum Operation Speed for
Input Value Check
1000
11 to 9999 mm/s When the maximum velocity check timing = at
input, check the input error with this parameter.
22 Maximum acceleration
100
1 to 999
0.01G
Restriction is given on each axis with the setting in
Each Axis Parameter No. 134 “Maximum
Operational Acceleration on each Axis” if it is set
effective.
23 Maximum deceleration
100
1 to 999
0.01G
Restriction is given on each axis with the setting in
Each Axis Parameter No. 135 “Maximum
Operational Deceleration on each Axis” if it is set
effective.