11 servo adjustment – IAI America XSEL-S User Manual
Page 409
Chapter 6 Parameter
6.1
1 Servo
Adjustment
401
6.11 Servo Adjustment
At the delivery from the factory, the parameter settings are established to obtain the stable
operational characteristics in an operation within the rated (maximum) transportable weight
defined for the actuator.
However, the preset setting cannot always be the optimum load condition in the actual use. In
such cases, it may be necessary to adjust the servo.
In this section, explains in basic how to adjust the servo.
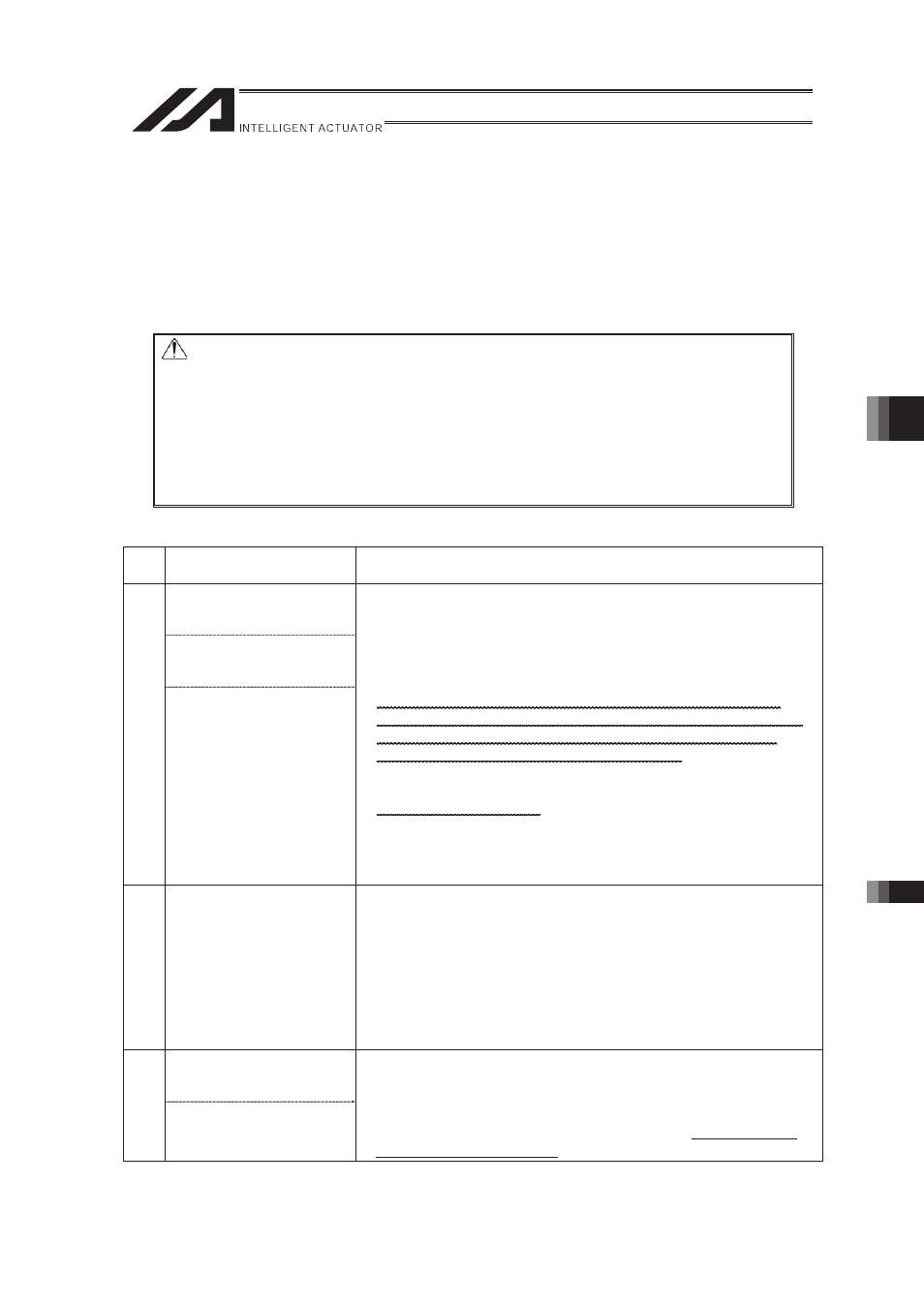
No. Phenomenon that
requires adjustment
How to adjust
Takes time to finish
positioning
Positioning accuracy is
not appropriate
1
Shorter cycle time is
desired
�
Increase the setting of Each Axis Parameter No. 60 “Position
Gain”. When the set value is increased, the follow-up ability to
the position command becomes better. As a reference for the
setting, it should be from 30 to 55, 80 at the maximum. If the
value is too large, an overshoot is caused easily and may
cause noise or vibration.
To secure the stability of the control system, also make an
adjustment of the setting in Driver Parameter No. 43 “Velocity
Loop Gain” in increasing direction when having Each Axis
Parameter No. 60 “Position Gain” increased.
When increasing the setting in Driver Parameter No. 43
“Velocity Loop Gain”, increase little by little approximately in
20% to the initial setting for every increase. Prioritize Each Axis
Parameter No. 60 “Position Gain” for the adjustment.
2 Vibration is generated at
acceleration/deceleration
�
It is concerned “Acceleration/Deceleration Setting” is too
extreme or the structure on the device that the actuator is
mounted is too weak. Reinforce the whole device first if
possible.
�
Decrease “Acceleration/Deceleration Setting”.
�
Have the setting in Each Axis Parameter No. 60 “Position Gain”
increased.
Decreasing the setting in Each Axis Parameter No. 60 “Position
Gain” makes the finishing time longer.
Speed is uneven during
the movement
3
Speed accuracy is not
appropriate
�
Have the setting in Driver Parameter No. 443 “Velocity Loop
Gain” increased. By setting a bigger number, the follow-up
ability to the speed command becomes better. Setting the value
too big makes the mechanical components easy to vibrate. As
a reference for the setting, increase the value little by little by
20% from the initial setting.
Caution : • Do not attempt to adjust the servo on SCARA Robot. It may cause a
failure operation.
• It is very dangerous to make extreme settings. They may devices
including the actuator to be damaged and/or people to be injured. Take
sufficient note on the setting.
Do not forget to make a record so the setting can be put back in any
time.
Please contact us if there is a problem or cannot reach to solve the
problem.