11 basic drive functions – Lenze 9400 User Manual
Page 380
11
Basic drive functions
11.1
General information
380
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.1.6
Start acceleration/acceleration reduction when the basic function changes
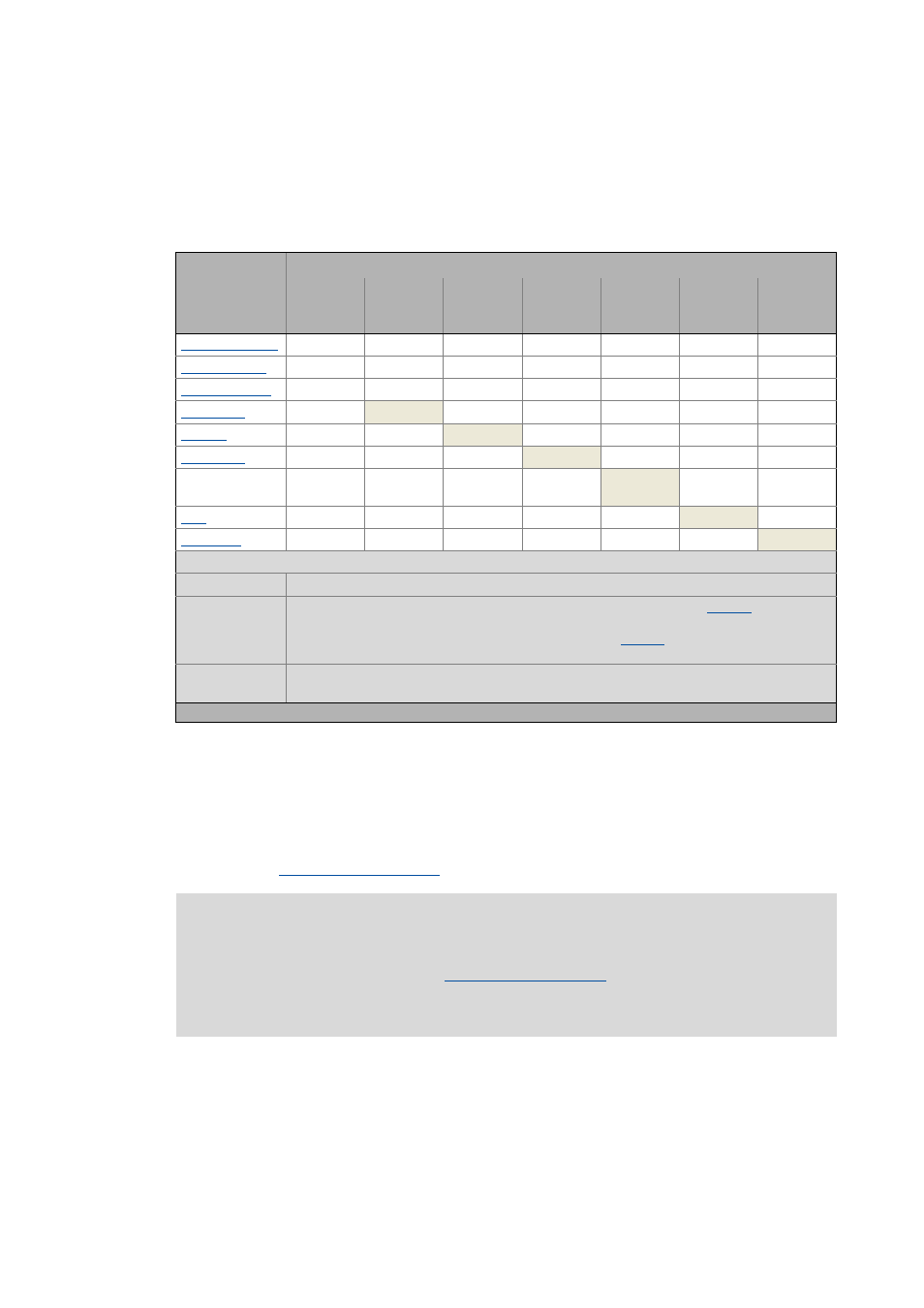
In order to make the transitions during the changeover between the single basic functions as jerk-
free as possible, i.e. preventing acceleration steps, the current setpoint acceleration is used as
starting value for the new basic function (see the following table).
Reduction of the start acceleration
Depending on the acceleration and S-ramp time parameterised in the basic function, the start
acceleration is reduced.
The following applies for software versions lower than V7.0:
• The start acceleration is reduced with the maximum jerk of the old or new basic
function.
to
from
Position, speed
or torque
follower
Manual jog
Homing
Positioning
Error/controller
not ready
Stop
Quick stop*
0
A
A
A
0
A
0
0
A
A
A
0
A
0
0
0
0
0
0
0
0
0
-
B
B
0
B
0
0
B
-
B
0
B
0
0
B
B
-
0
B
0
Error/controller
not ready
0
0
0
0
-
0
0
0
B
B
B
0
-
0
0
A
A
A
0
A
-
Legend:
0 The start acceleration is defined with "0", thus no acceleration reduction is required.
A
• Acceleration value is generated from the differentiation and filtering (
) of the active
setpoint speed.
• Jerk = Maximum value from transition jerk (defined via
) and jerk of the "new" profile
data.
B
• Acceleration value is taken from the setpoint generator (e.g. profile generator).
• Jerk = maximum value from the jerk of the "old" and "new" profile data.
* Also quick stop by trouble
Note!
Very low jerks cause very high speeds!
See also the following chapter "
Since this behaviour is mostly not wanted or expected, the acceleration is reduced from
software version V7.0 as described in the following section.