5motor interface – Lenze 9400 User Manual
Page 233
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
233
5
Motor interface
5.10
Internal interfaces | "LS_MotorInterface" system block
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
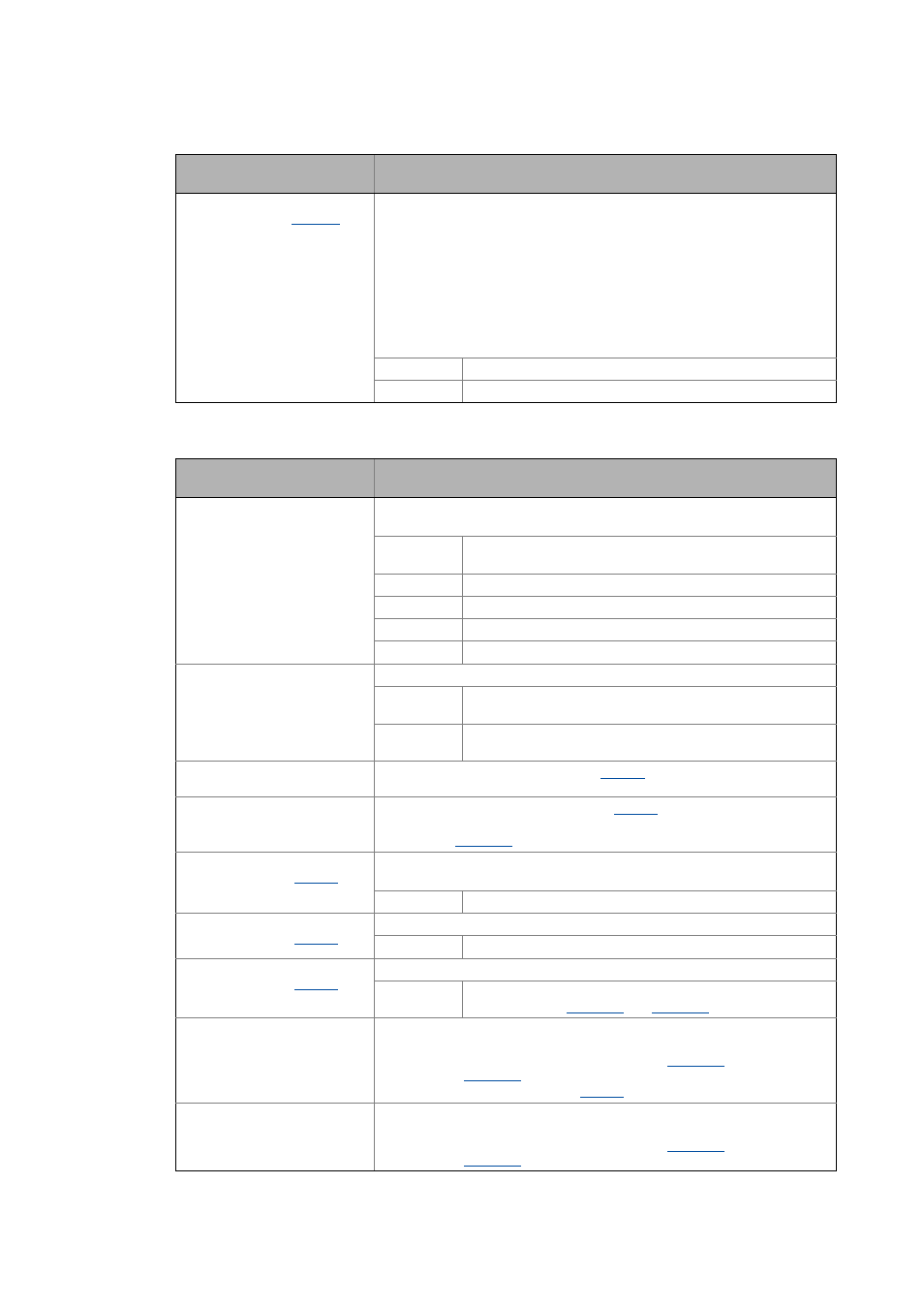
Outputs
MI_dnTorqueAdd_n
| DINT
From V8.0
Additional torque feedforward control value in [%]
This input serves to provide an additional torque setpoint. In this way, you can
provide an additional torque for the basic functions manual jog, positioning and
homing besides the acceleration feedforward control.
• 100 % = motor reference torque
If the controller is enabled, the torque setpoints at this input have a direct effect
on the drive!
The user has to
• apply the appropriate setpoint for every state of the drive.
• avoid setpoint step-changes.
- 200 %
+ 200 %
Identifier
DIS code | data type
Value/meaning
MI_dwControlMode
DWORD
Active control structure of the motor control
• Displayed value is bit-coded:
Bit 1 Position control without feedback, external following error
calculation
Bit 2 Position control with encoder on the motor side
Bit 3 Position control with encoder on the load side
Bit 4 Speed control
Bit 5 Torque control
MI_bMotorOrientationInverse
BOOL
Parameterised motor mounting position
FALSE Motor mounting position in the same direction, setpoints are
not defined.
TRUE Motor mounting position in the opposite direction, setpoints are
reversed.
MI_dwReferenceSpeed
DWORD
Parameterised motor reference speed (
) in [rpm]
MI_dwReferenceTorque
DWORD
Reachable motor torque with I
max_device
) in [mNm]
• 1000 mNm ≡ 1 Nm
• Display in
in [Nm]
MI_bLimitationActive
| BOOL
Status signal "Internal limitation active"
• Group signal for all limitation messages.
TRUE One of the internal limitations is active.
MI_bPosCtrlLimited
| BOOL
Status signal "Phase/position controller at the limit"
TRUE The limitation of the phase and/or position controller is active.
MI_bSpeedSetPointLimited
| BOOL
Status signal "Resulting speed setpoint at the limit"
TRUE The resulting speed setpoint is limited to the limit values
and
MI_dnSpeedSetpoint_n
DINT
Current speed setpoint from position control and speed feedforward control or
direct setpoint selection in [%]
• After limitation by the upper speed limit value (
limit value (
• 100 % ≡ Motor reference speed (
)
MI_dnSpeedSetpoint_s
DINT
Current speed setpoint from position control and speed feedforward control or
direct setpoint selection in [rpm]
• After limitation by the upper speed limit value (
limit value (
Identifier
DIS code | data type
Information/possible settings