1 optimising field feedforward control, 5motor interface – Lenze 9400 User Manual
Page 173
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
173
5
Motor interface
5.5
Sensorless vector control (SLVC)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.5.3.1
Optimising field feedforward control
To optimise the field feedforward control, the drive must be accelerated in the base speed range
with slow setpoint ramps (e.g. acceleration time = 5 s) to speed values below the rated speed and
then decelerated again.
• If the field current oscillates at the beginning of the acceleration and at the end of the
deceleration (Current.dnActualDirectCurrent), these oscillations can be reduced by increasing
the gain for the field current controller in
.
[5-9]
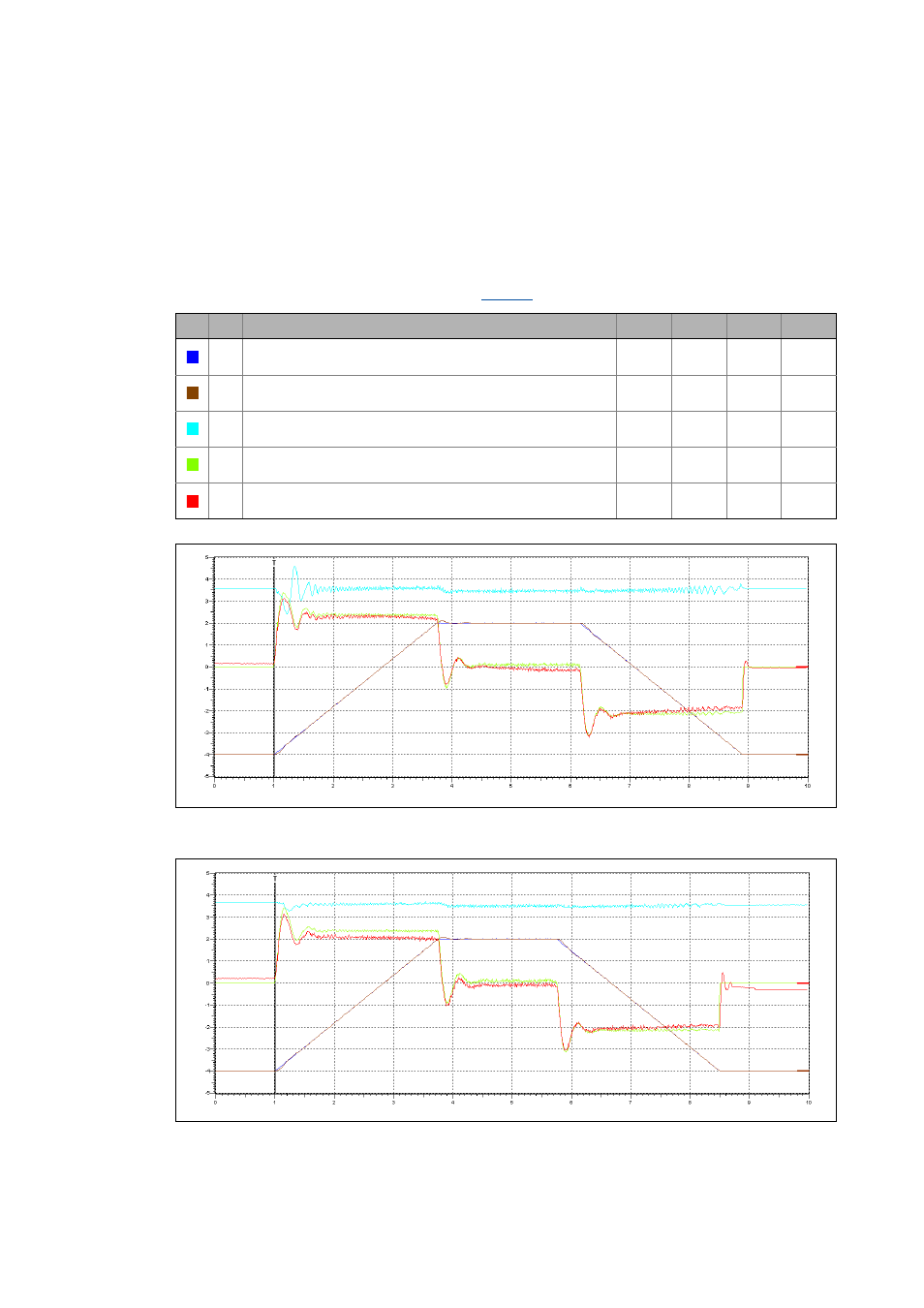
Oscillogram 1: speed ramp (motor 55 kw) – field controller gain = 0.00
[5-10] Oscillogram 2: speed ramp (motor 55 kw) – field controller gain = 2.00
Ch Variable of the motor control
Unit
1/div
Offset
Position
1
Speed.dnSpeedSetpoint (speed setpoint)
rpm
0.2k
0
-4
2
Speed.dnActualMotorSpeed (current speed)
rpm
0.2k
0
-4
3
Current.dnActualDirectCurrent (actual field current)
A
10
0
0
4
Current.dnQuadratureCurrentSet (cross current setpoint)
A
10
0
0
5
Current.dnActualQuadratureCurrent (actual cross current)
A
10
0
0