5motor interface – Lenze 9400 User Manual
Page 139
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
139
5
Motor interface
5.3
Adjusting motor and controller to each other
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
• The motor parameters listed in the following table are excluded from the automatic
determination and must be adapted to the motor used (see motor nameplate) before the
determination.
How to determine the motor parameters:
1. If the controller is enabled, inhibit the controller, e. g. with the device command
= "41: Inhibit controller".
2. Execute device command
= "72: Determine motor parameters".
The procedure starts with controller enable, if
• no other identification is active,
• no error has occurred, and
• no test mode is activated.
If one of the above conditions is not met, the procedure is cancelled and the corresponding
device command status is indicated under
Note:
By means of controller inhibit, the started procedure can be cancelled anytime, if required,
without altering the codes for the motor parameters.
For detailed information about the procedure, please see the following section "Sequence".
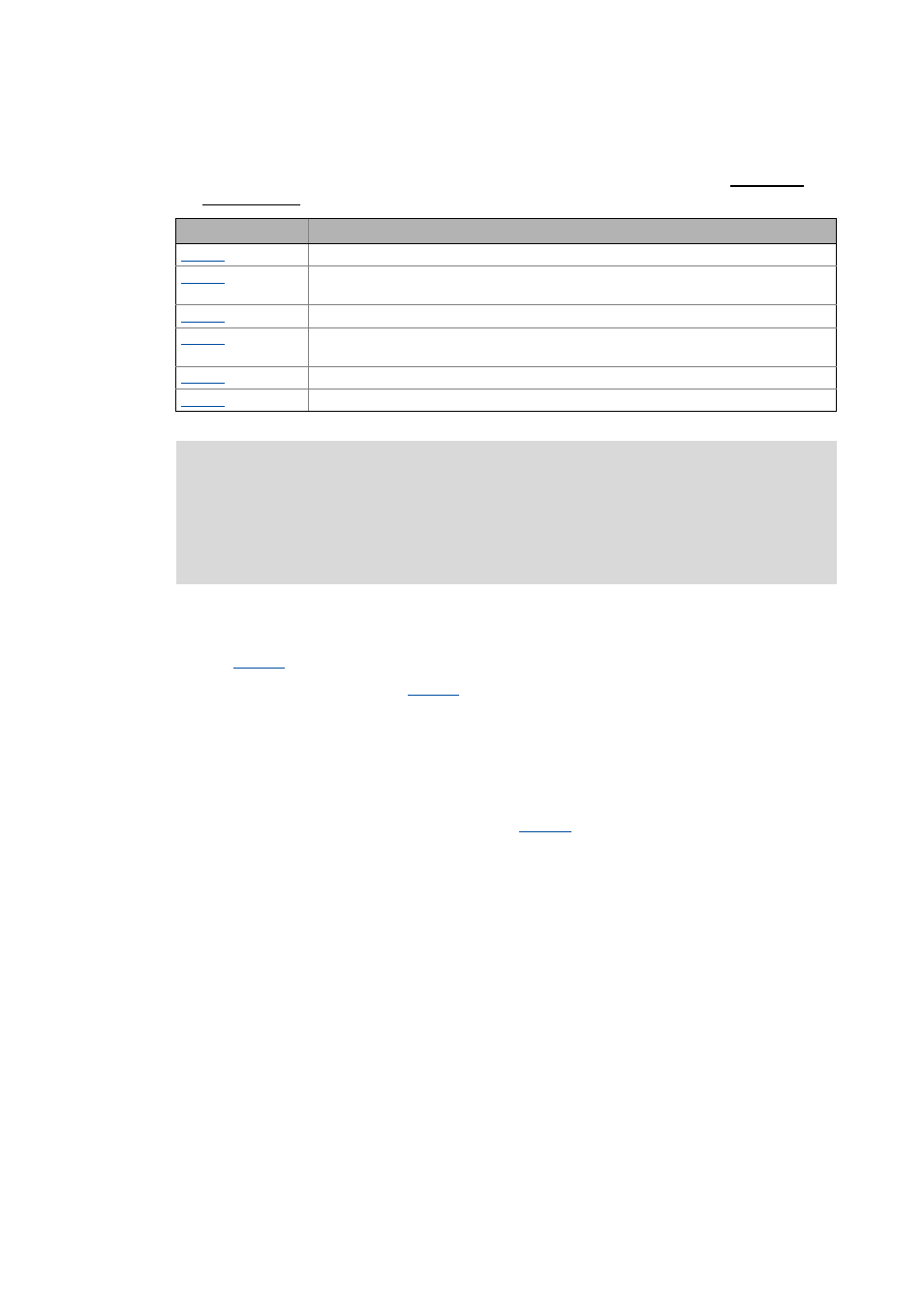
Parameter
Info
Rated motor power
Motor stator resistance
(Default setting is used as starting value for the automatic determination.)
Rated motor speed
Rated motor current
(The current amount for the procedure is derived from this specification)
Rated motor frequency
Rated motor voltage
Note!
For devices of the types 9 + 10 (from 132 kW) the automatic determination of the motor
parameters may fail and a corresponding status display is output.
Remedy: Parameterise the motor parameters manually by means of the manufacturer's
data sheet.