12 oscilloscope – Lenze 9400 User Manual
Page 596
12
Oscilloscope
12.6
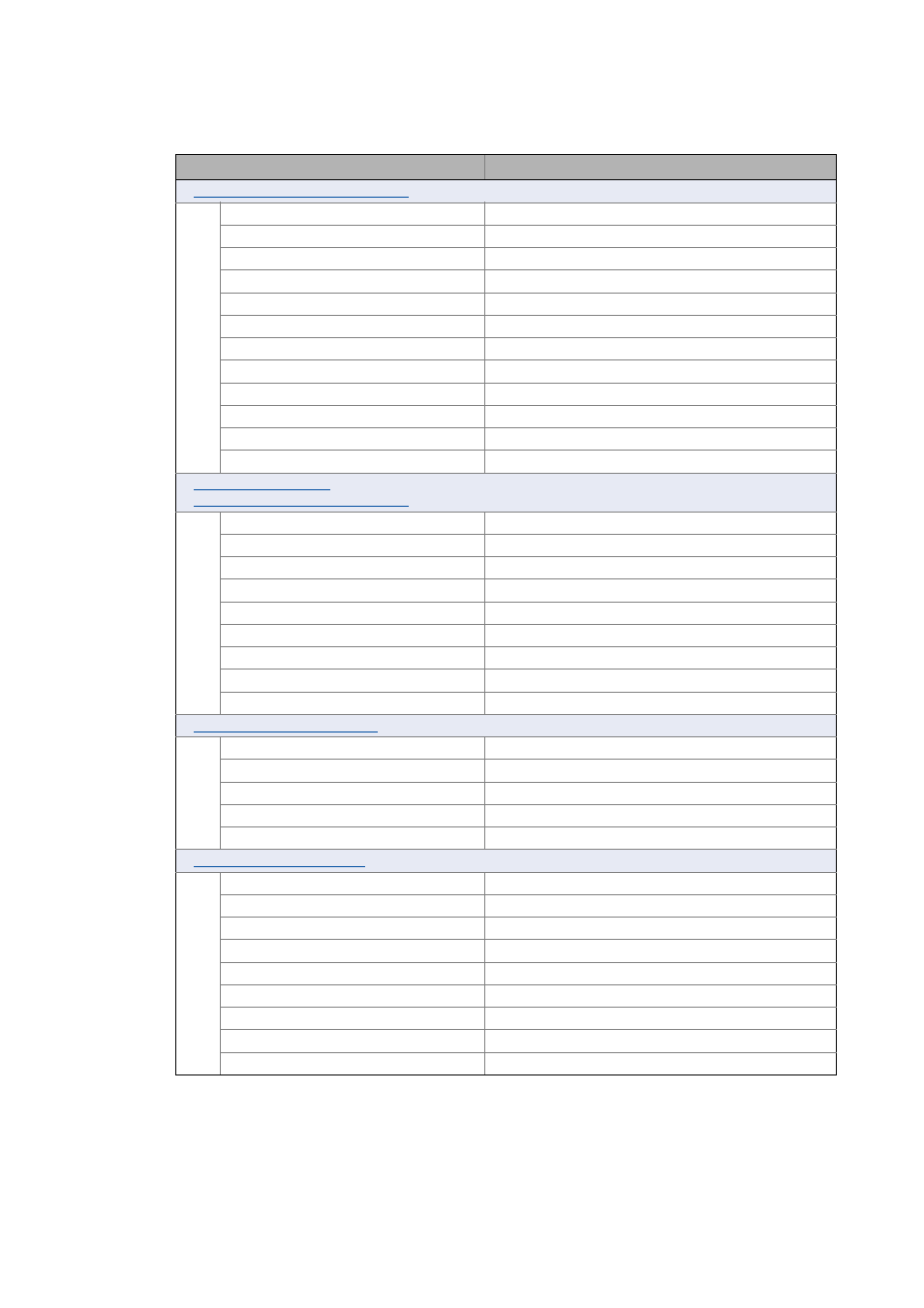
Variables of the motor control (oscilloscope signals)
596
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Signal flow - sensorless vector control ( 180)
Common.dnActualFlux
Actual flux value
Current.dnActualDirectCurrent
Actual D current
Current.dnActualQuadratureCurrent
Actual Q current
Current.dnDirectCurrentSet
D current setpoint
Current.dnQuadratureCurrentSet
Q current setpoint
Frequency.dnActualRotatingFieldFrequency Actual field frequency
Frequency.dnActualSlipFrequency
Actual slip frequency
Speed.dnActualMotorSpeed
Actual speed value
Torque.dnTorqueSetpoint
Torque setpoint
Voltage.dnActualMotorVoltage
Current motor voltage
Voltage.dnDirectVoltage
D voltage
Voltage.dnQuadratureVoltage
Q voltage
Signal flow - V/f control ( 196)
Signal flow for closed loop V/f control ( 198)
Current.Current.dnActualMotorCurrent
Actual motor current
Current.dnActualQuadratureCurrent
Actual Q current
Frequency.dnActualRotatingFieldFrequency Actual field frequency
Frequency.dnActualSlipFrequency
Actual slip frequency
Speed.dnActualMotorSpeed
Current motor speed
Speed.dnSpeedSetpoint
Speed setpoint
Voltage.dnActualMotorVoltage
Current motor voltage
Voltage.dnOutputDirectCurrentCtrl
D voltage
Voltage.dnOutputQuadratureVoltage
Q voltage
Signal flow - encoder evaluation ( 240)
Position.dnActualLoadPos
Actual position
Position.dnActualMotorPos
Current motor position
Speed.dnActualEncoderSpeed
Current encoder speed
Speed.dnActualMotorSpeed
Current motor speed
Speed.dnActualResolverSpeed
Current resolver speed
Signal flow - position follower ( 487)
Position.dnActualLoadPos
Actual position
Position.dnActualMotorPos
Current motor position
Position.dnContouringError
Following error
Position.dnPositionSetpoint
Position setpoint
Speed.dnActualMotorSpeed
Current motor speed
Speed.dnOutputPosCtrl
Output signal - phase controller
Speed.dnSpeedSetpoint
Speed setpoint
Torque.dnTorqueSetpoint
Torque setpoint
Torque.dnTotalTorqueAdd
Additive torque feedforward control value
Variable of the motor control
Meaning