1 software limit positions, Software limit positions, 11 basic drive functions – Lenze 9400 User Manual
Page 508
11
Basic drive functions
11.11
Limiter
508
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.11.2.1 Software limit positions
The parameterisable limit positions are used by the software to limit the traversing range.
• The positive software limit position is set in
, and the negative software limit position
is set in
.
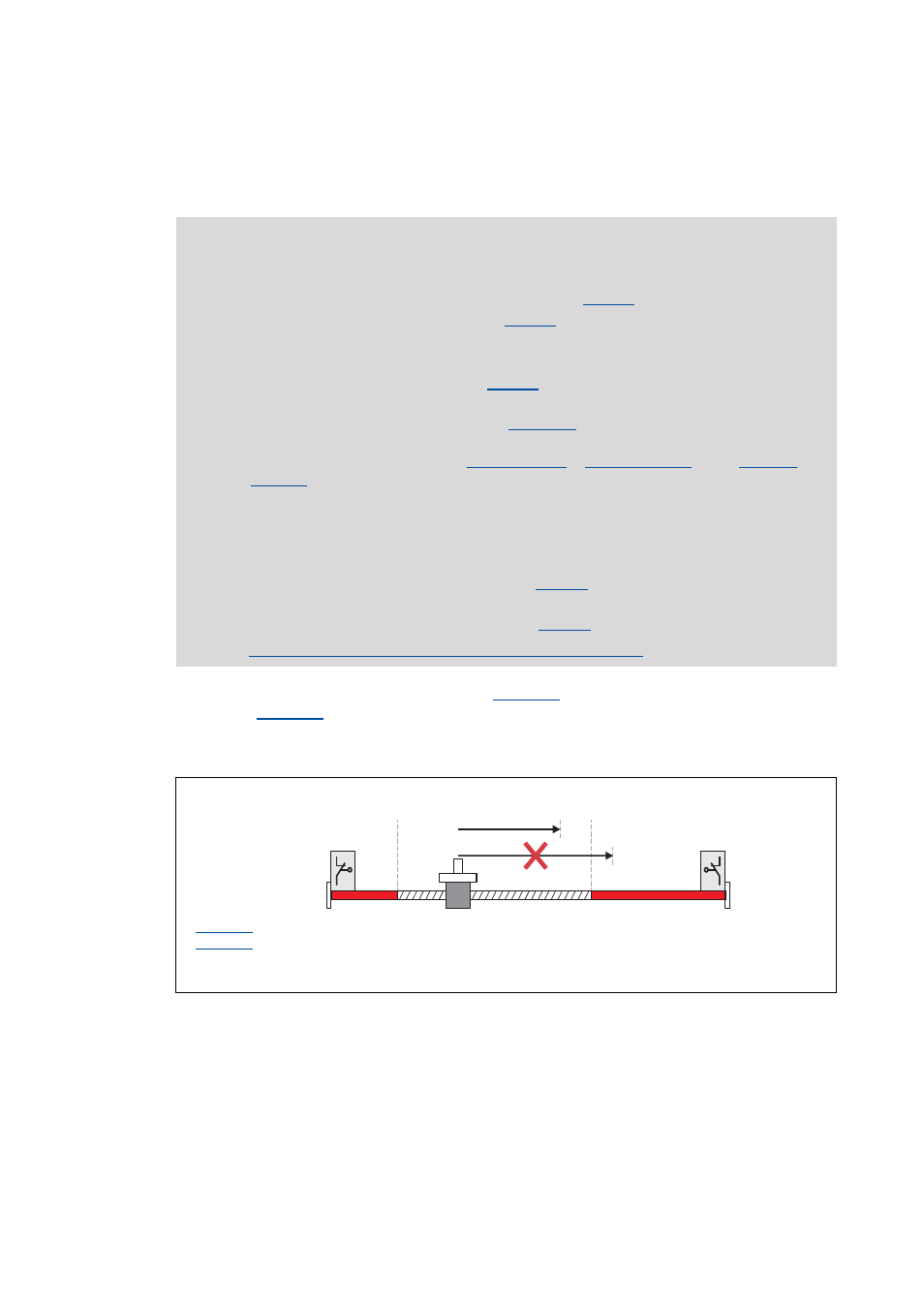
• If the software limit positions are active, travelling commands that would result in exiting from
the permissible travel range can no longer be executed:
[11-26] Example: Traversing range limitation by means of software limit positions
Note!
Software limit positions are only evaluated and monitored if the drive knows the home
position and the software limit positions are active (
= "1").
• When the traversing range is limited (
= "1") and the software limit positions
are not active, the range is limited by the software to the internal value range that can
be maximally displayed (±2
31
increments).
• For the "Modulo" traversing range (
= "2") the software limit positions are
generally not effective.
• If the error response that can be set in
is deactivated or is only set to
"Warning" or "Information", the software limit positions are not effective in an active
manner for the basic functions "
", "
• After the software limit positions have been exceeded, it must be ensured before
acknowledging a pending error that the setpoint applied to the SB
LS_PositionFollower is not beyond the software limit positions.
From software version V4.0 onwards
, the triggering behaviour of the software limit
position monitoring can be parameterised in
• If you want to maintain the device behaviour known from the previous versions,
select "1: Based on set and actual value" in
Triggering behaviour of software limit position monitoring
: Negative software limit position
: Positive software limit position
Travel command possible
Travel command not possible since the target position is outside the permissible traversing range.
C02701/2
C02701/1
ь