5motor interface – Lenze 9400 User Manual
Page 210
5
Motor interface
5.8
Parameterisable additional functions
210
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Sequence
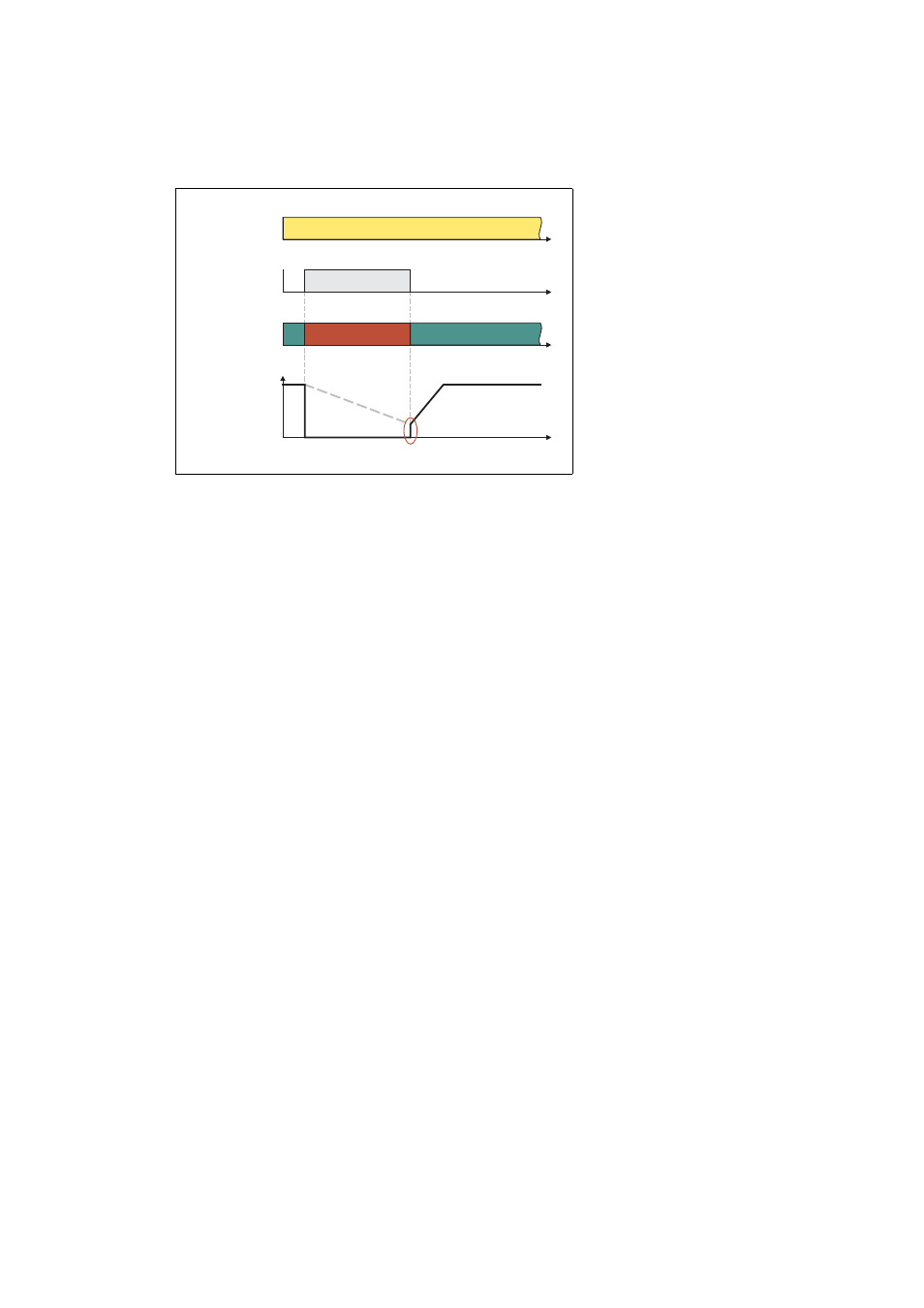
[5-32] Process example: Speed follower is active Controller inhibit Controller enable
Flying restart process
The controller calculates the output frequency required for the momentary speed of the coasting
motor, then connects to the system, and accelerates the motor to the defined setpoint again.
• The flying restart process serves to prevent the motor from decelerating to zero speed with
subsequent acceleration.
• The currently detected flying restart speed is provided to the application via the current motor
speed MI_dnActualMotorSpeed_s.
A. Initial situation: basic function
"Speed follower" is enabled and
active.
B. The controller is inhibited while
the drive is not at standstill.
C. The motor coasts down
(torqueless).
D. The controller inhibit is
deactivated again.
E. The flying restart process starts.
t
t
t
Speed follower enabled
t
Speed setpoint
Speed follower active
Drive not ready
Actual
speed
CINH
0
1
2
3
4