1 controller configuration, Controller configuration, 6encoder evaluation – Lenze 9400 User Manual
Page 243
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
243
6
Encoder evaluation
6.3
Parameter setting
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.1
Controller configuration
The device interfaces for the encoder on the motor side and, if available, on the load side are directly
assigned to the corresponding control according to the structure of the position control selected
(
):
• If only an encoder on the motor side is available, this "motor encoder" provides the actual value
signals for the phase/position control and the speed control.
• In this case both the angle control and the position control can be selected.
• When selecting the position control, make sure that the position encoder selection "10:
Motor encoder (C00495)" is set in
. With this selection, the mounting position and the
resulting gearbox factor are already considered.
• The motor encoder supports the secondary servo control irrespective of the use for position
and speed control (commutation).
• If an additional encoder is available on the load side, this "position encoder" only supports the
position control and
accordingly has to be set to "Position controller active", so that the
position encoder is evaluated.
• The used position encoder must be set in
.
• The position encoder mounting direction must be set in
• The starting position of the position encoder can be set via the basic function "Homing".
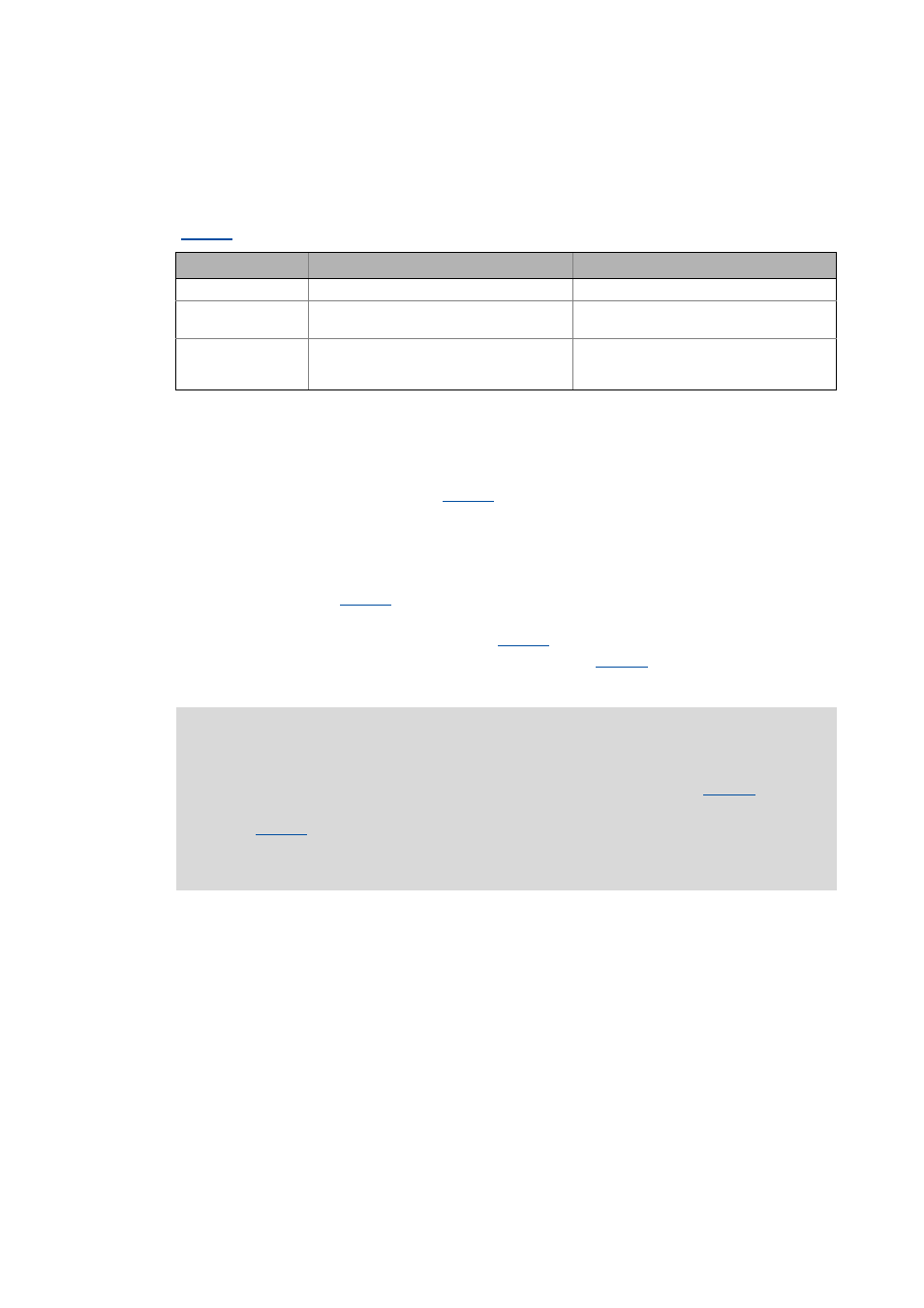
Phase control (Lenze setting)
Position control
Cycle time: 250 μs
Application-dependent
Dead time: Smaller dead time in the actual value
channel
Same dead time for position setpoint and
actual position
Use: In positioning technology and single-axis
applications or if only one encoder is used.
In multi-axis applications or if a position
encoder is used in addition to the motor
encoder.
Note!
When the basic function "Quick stop" is activated, the controller configuration is always
switched over to angle control internally, irrespective of the setting in
• If the basic function "Quick stop" is to be used, the gain of the phase controller
(
) must also be set correctly for the "Position control" controller configuration.
For the technology applications for the interconnection via the "Electrical shaft", the
controller configuration is set to position control in the default setting.