2 system with motor encoder, System with motor encoder, 6encoder evaluation – Lenze 9400 User Manual
Page 245
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
245
6
Encoder evaluation
6.3
Parameter setting
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.2
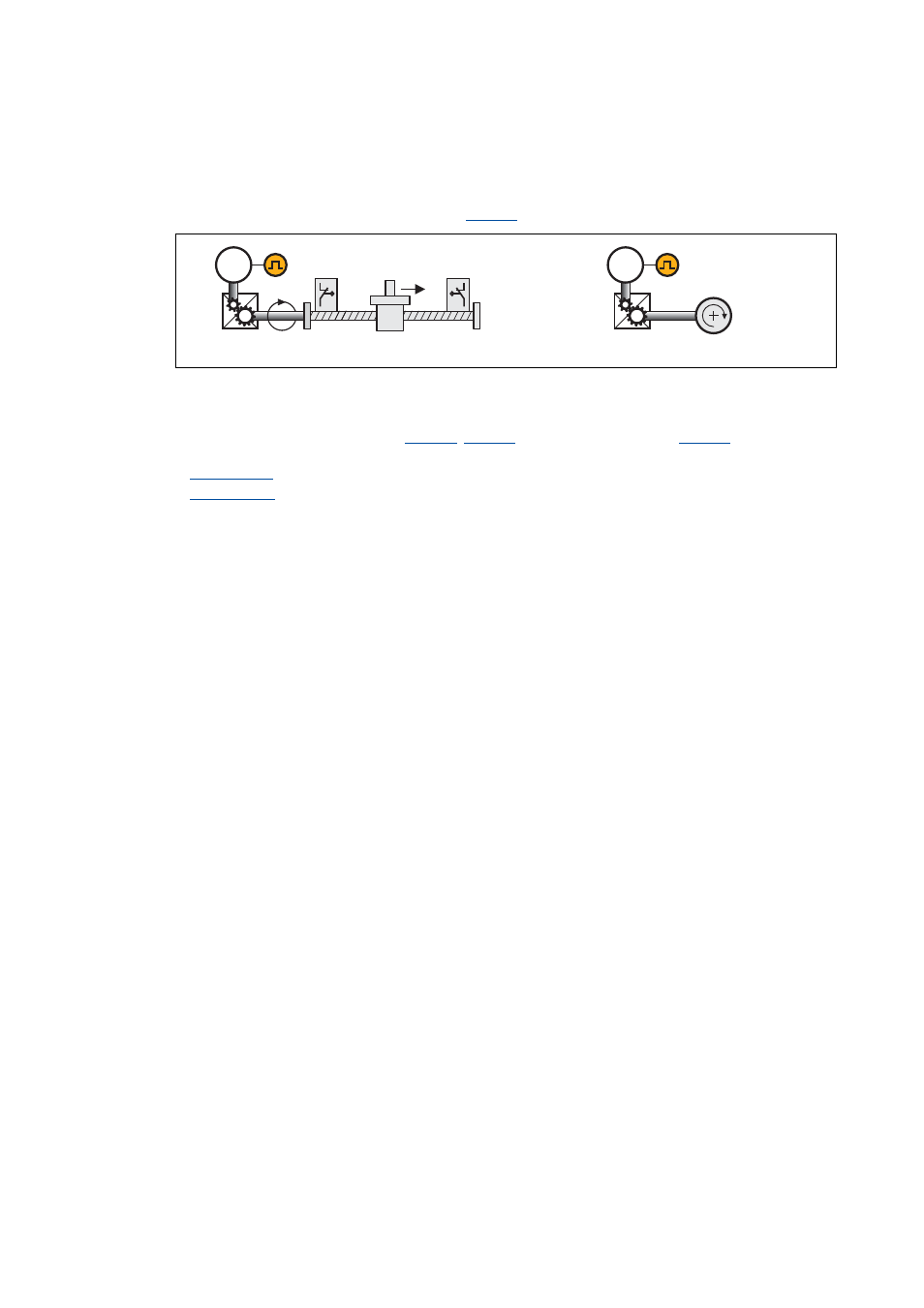
System with motor encoder
No encoder is installed on the load side. The motor position (angle of rotation) and motor speed are
detected via the motor encoder selected in
and are converted with regard to the load side.
[6-2]
Schematic diagram - feedback with position encoder = motor encoder
The actual position and actual speed values on the machine side result from the conversion via the
gearbox factor on the motor side (
) and the feed constant (
).
See also:
Motor encoder
M
M
This manual is related to the following products: