10 provision of the encoder signal of input x8, 1 system block "ls_encoderx8, Provision of the encoder signal of input x8 – Lenze 9400 User Manual
Page 260: 6encoder evaluation
6
Encoder evaluation
6.3
Parameter setting
260
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3.10
Provision of the encoder signal of input X8
This function extension is available from software version V7.0!
The LS_EncoderX8 system block serves to provide the encoder signal of input X8 to the application,
independent of the selected feedback system for the motor encoder and position encoder.
Application cases:
• High-resolution speed encoder as master encoder /value, correcting signal, ...
• Absolute value encoder for length measurements
• Display of the absolute encoder value without considering an offset
6.3.10.1
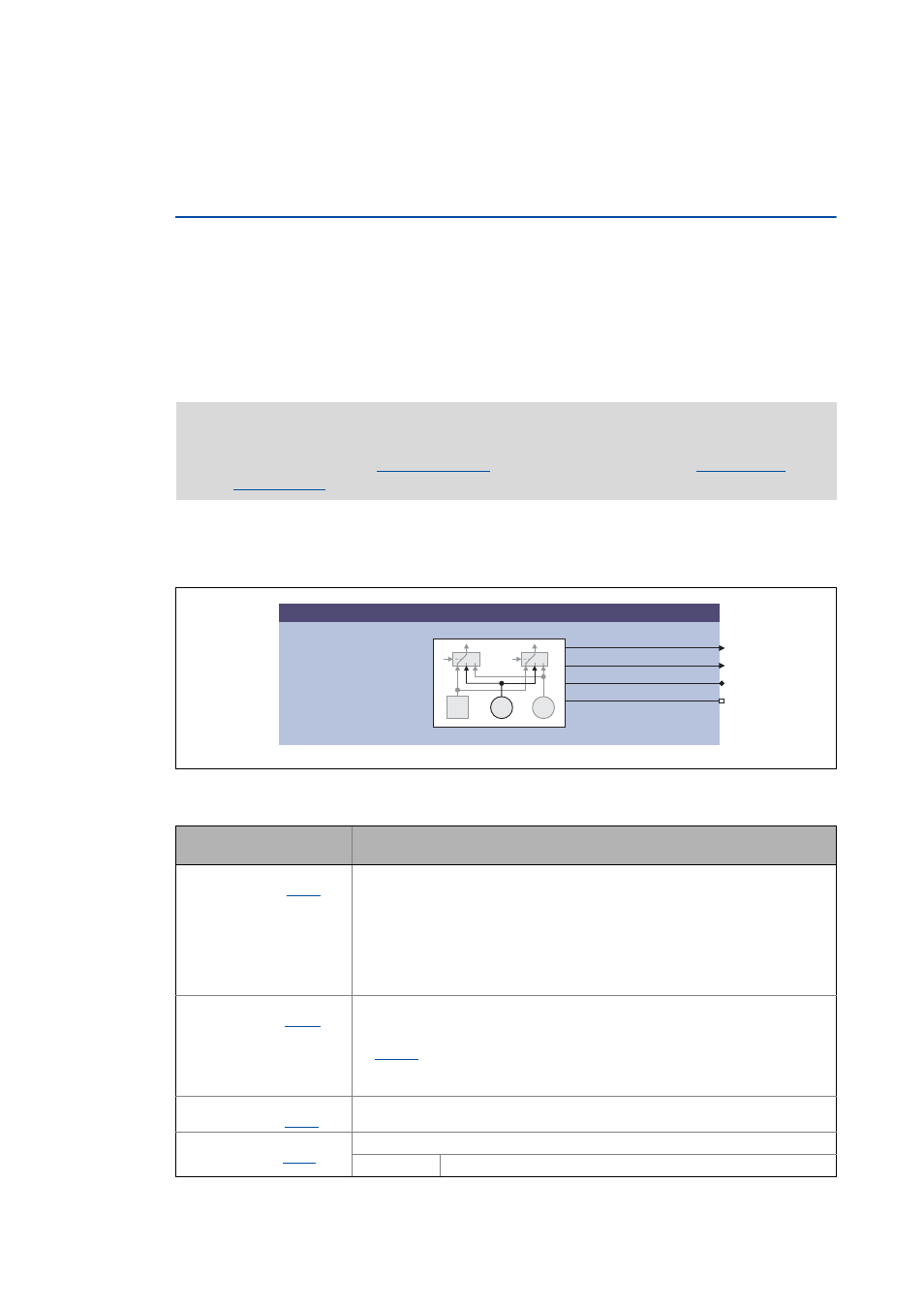
System block "LS_EncoderX8"
The LS_EncoderX8 system block provides the input X8 to the application in the function block editor.
Outputs
Note!
system block must be used.
Identifier
DIS code | data type
Value/meaning
ENC_dnEncoderOut1
|DINT
Display of the current encoder position (steps) within one revolution
• 1 revolution ≡ 2
32
bits
Note:
In order to convert the encoder information/position into a position_p in the
internal measuring system, connect both outputs ENC_dnEncoderOut1 and
ENC_dnEncoderOut2 with the inputs dnEncoderIn and dnEncoderIn2 of the
FB L_EsEncoderConv. A storage with mains failure protection of the position signal
is also processed via this FB.
ENC_dnEncoderOut2
|DINT
Display of all revolutions of the encoder (only with Multiturn)
• After the max. presentable revolutions have been reached, the value jumps back
to "0".
•
shows the max. presentable revolutions of the MultiTurn encoder
(encoder-dependent).
• In case of SingleTurn, the value "0" is always output.
ENC_dnActualSpeed_s
| DINT
Current encoder speed in [rpm]
ENC_bError
| BOOL
Status signal "Encoder error"
TRUE An encoder error has occurred.
LS_EncoderX8
ENC_dnEncoderOut1
ENC_dnActualSpeed_s
ENC_bError
R
G
E
ENC_dnEncoderOut2