11 basic drive functions – Lenze 9400 User Manual
Page 390
11
Basic drive functions
11.3
Quick stop
390
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
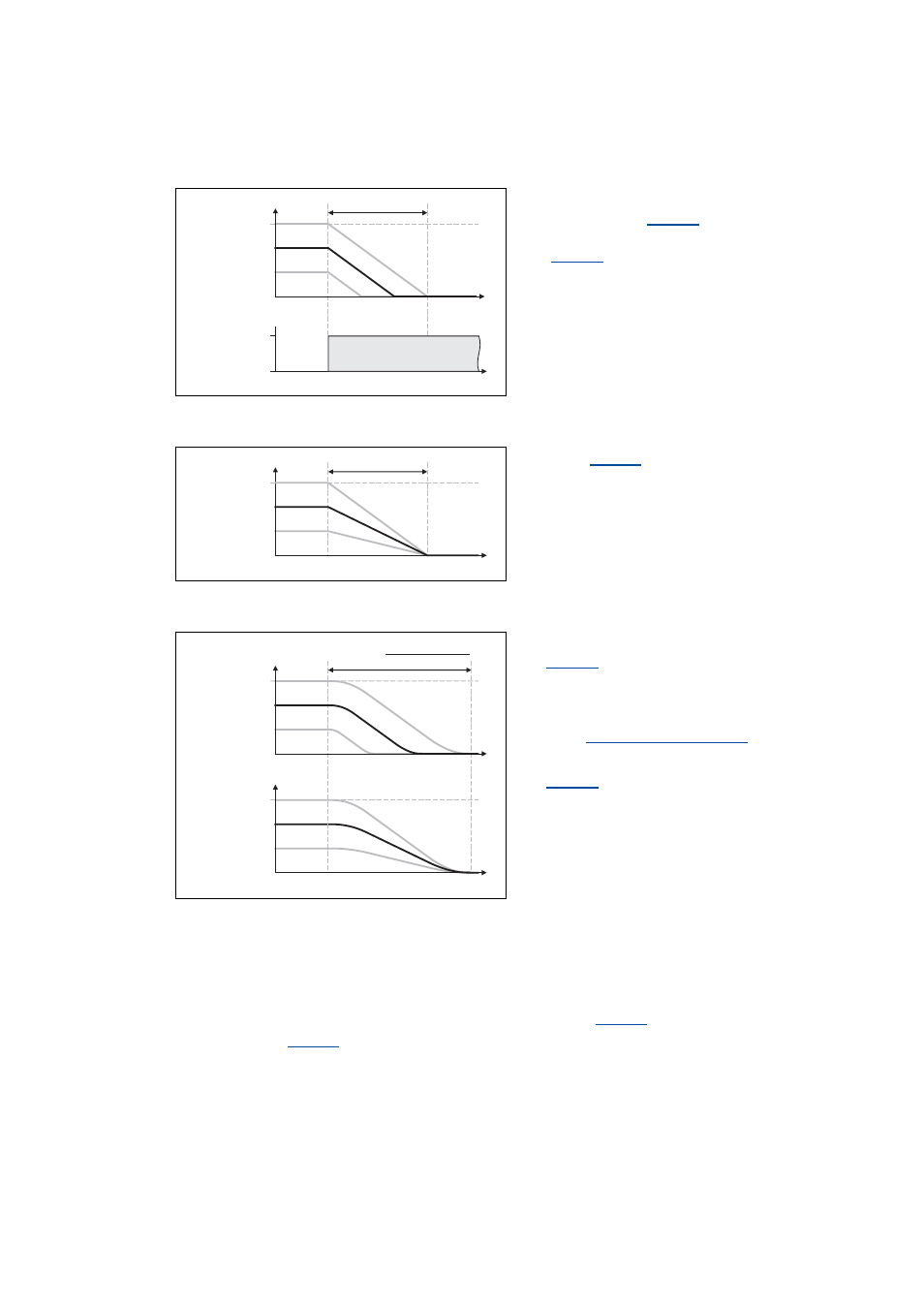
Parameter setting of quick stop
[11-11] Deceleration time referred to the motor reference speed
[11-12] Deceleration time referred to the current speed
[11-13] S-shaped deceleration ramp through selection of a relative S-ramp time
Tip!
After reaching standstill, the standstill position can be maintained while a torque is
applied.
• For this purpose, select the phase controller gain in
> "0".
> "0" the phase control is automatically activated after the standstill is
reached.
• The deceleration time for the quick stop
variation from the motor reference speed
) to standstill.
n
t
C00011
C00105
TRUE
FALSE
bActivate1...3
t
is set = "1", the deceleration
time refers to the current speed.
C00105
n
t
C00011
• By entering a relative S-ramp time in
, the deceleration ramp can be set
in an S-shaped manner for purposes of jerk
limitation; the total time until standstill is
then extended by the S-ramp time
set.
• Braking time at motor reference speed or
= "1":
n
t
C00011
n
t
C00011
C00107 = 0
C00107 = 1
C00105 +
C00105 C00106
×
100 %
C00105 C00105 C00106 [%]
⋅
100 %
------------------------------------------------------
+