1 internal interfaces | "ls_feedback" system block, Internal interfaces | "ls_feedback" system block, 6encoder evaluation – Lenze 9400 User Manual
Page 237
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
237
6
Encoder evaluation
6.1
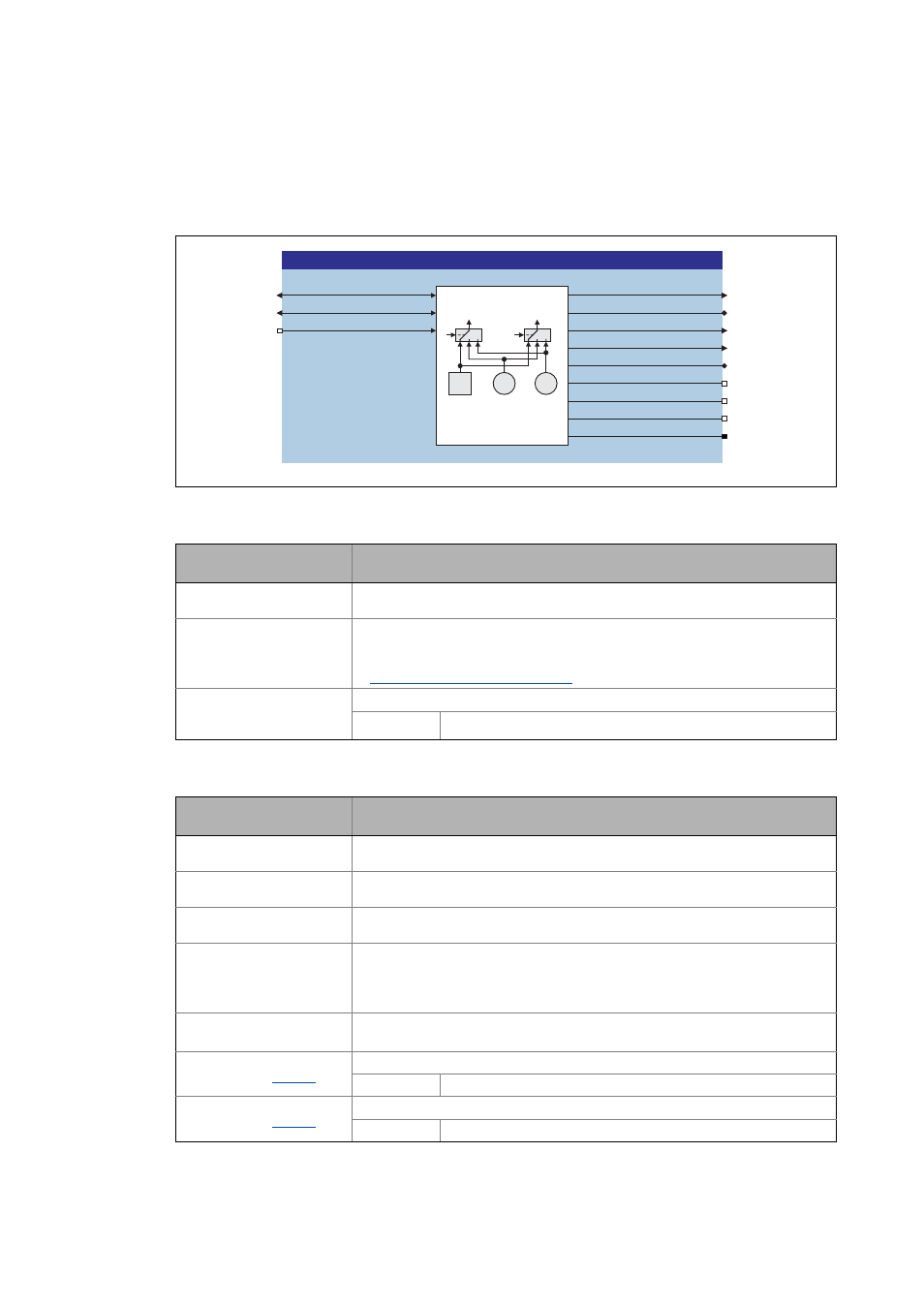
Internal interfaces | "LS_Feedback" system block
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.1
Internal interfaces | "LS_Feedback" system block
The LS_Feedback system block provides the internal interfaces for the basic function "Encoder
evaluation" in the function block editor.
Inputs
Outputs
Identifier
Data type
Information/possible settings
FDB_dnPosOffset_p
DINT
Offset for position setpoint and actual position in [increments]
FDB_dnActPosIn_p
DINT
External actual position in [increments]
• For the selection of an external actual position with a corresponding position
control.
Use of an external position encoder ( 239)
FDB_
bResetPosFollowingError
BOOL
Input for deleting the following error
True
The position setpoint is equated with the actual position value.
Identifier
DIS code | data type
Value/meaning
FDB_dnActualPos_p
DINT
Current position of the position encoder in [increments]
FDB_dnActualSpeed_s
DINT
Current speed of the position encoder in [rpm]
FDB_dnPosFollowingError_p
DINT
Current following error in [increments]
FDB_dnSetPos_p
DINT
Set position calculated by active basic drive function in [increments]
• Considering the motor mounting position.
• In the case of an active speed or torque control (instead of position control) the
actual position (FDB_dnActualPos_p) is shown at this output.
FDB_dnSetSpeed_s
DINT
Setpoint speed calculated by active basic drive function in [rpm]
• Considering the motor mounting position.
FDB_bResolverError
| BOOL
Status signal "Resolver error"
TRUE A resolver error (e.g. open circuit) has occurred.
FDB_bSinCosSignalError
| BOOL
Status signal "sine/cosine encoder error"
TRUE A sine/cosine encoder error has occurred.
LS_Feedback
FDB_dnActualPos_p
FDB_dnActualSpeed_s
FDB_dnPosFollowingError_p
FDB_bResolverError
FDB_bSinCosSignalError
FDB_bEncoderComError
FDB_dnPosOffset_p
R
G
E
FDB_dnSetPos_p
FDB_dnSetSpeed_s
FDB_dnActPosIn_p
FDB_bResetPosFollowingError
FDB_dnSetAcc_x