2 parameterising motor encoder, Parameterising motor encoder, 5motor interface – Lenze 9400 User Manual
Page 126: Danger
5
Motor interface
5.3
Adjusting motor and controller to each other
126
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.3.2
Parameterising motor encoder
Tip!
Detailed information on the encoder evaluation and on the use of a separate position
encoder can be found in the following main chapter "
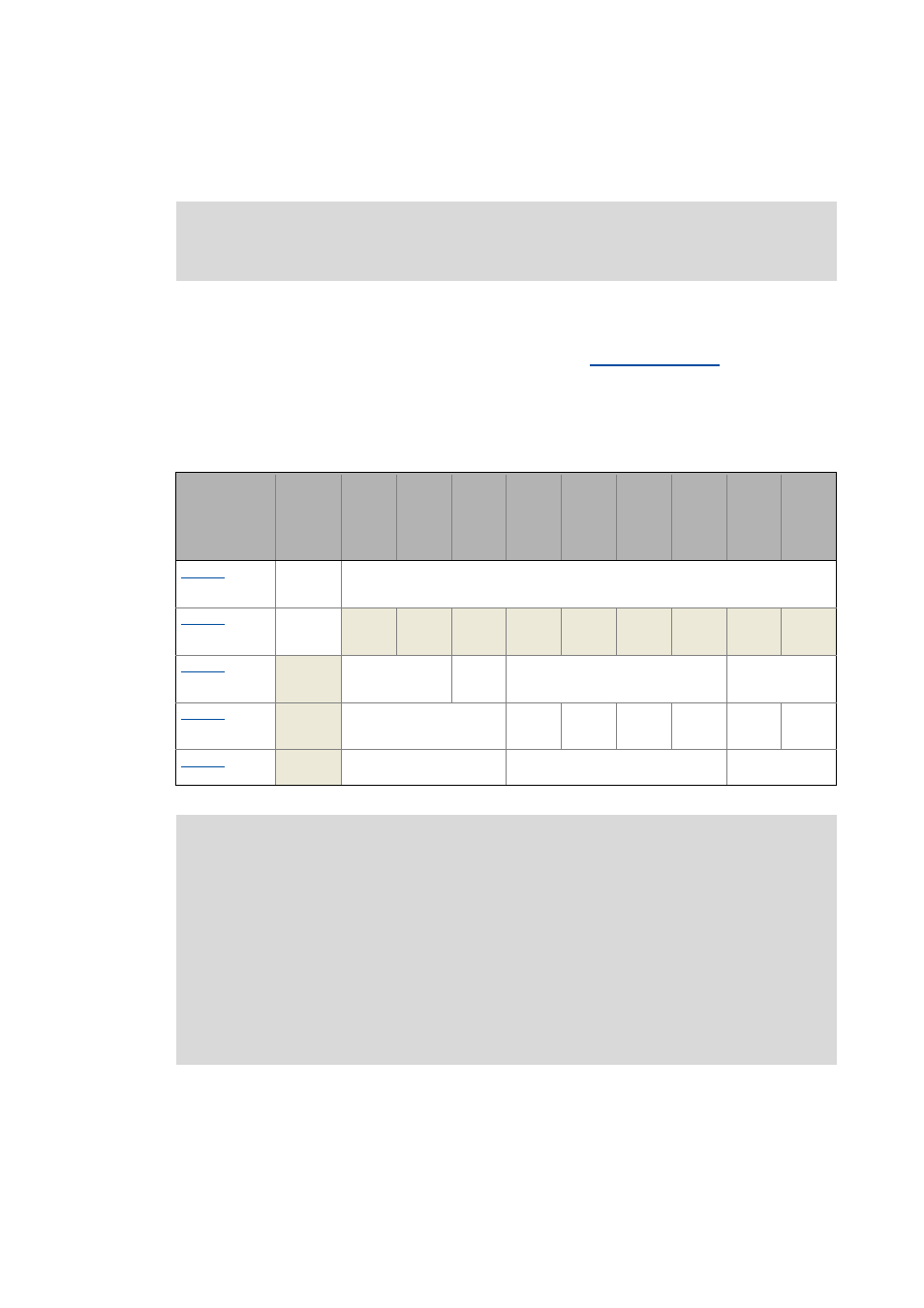
• The motor encoder can be parameterised on the Application parameters tab of »Engineer« in
the Overview Motor Encoder dialog level.
• The following table shows the required settings for different encoder types:
Note!
Only required for servo control and closed loop V/f control!
Encoder type:
Resolver
Tamagawa
CDD50
ITD21
ITD22
SEK...
SEL...
SKS...
SKM...
SCS70
SCM70
SRS50
SRM50
ECN1313
EQN1325
EQI1329
Motor type:
MCS
MCA
MDxKS
MDXMA
MCA
MDFQA
LMR
MDFQA
LMR
MDxKS
MCS
MCA
MCS
MCA
MCS
MCA
Motor encoder
selection
0
Resolver
1
Encoder
Number of resolver
pole pairs
1
-
-
-
-
-
-
-
-
-
Encoder type
-
0
Incremental encoder
(TTL signal)
1
Sin/cos
encoder
2
Absolute value encoder (Hiperface)
3
Absolute value
encoder (EnDat)
Number of encoder
increments
-
2048
16
128
512
1024
2048
32
Encoder voltage
-
5 V
8 V
5 V
Danger!
If the encoder/resolver is used as motor encoder:
In case of error, safe operation of the motor is no longer guaranteed!
When servo control is used:
• For the (open circuit) monitoring of the encoder/resolver for reasons of safety always
the "Fault" response (Lenze setting) should be set!
When V/f control is used:
• For this type of motor control, the drive basically is to coast down after an encoder
failure and may not stop, therefore the "Warning" response is to be set for the (open
circuit) monitoring in this case!