5 requesting control via a basic function, 11 basic drive functions – Lenze 9400 User Manual
Page 379
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
379
11
Basic drive functions
11.1
General information
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.1.5
Requesting control via a basic function
Enable input "bEnable"
The basic functions "
", "
" and the three setpoint followers each
possess an bEnable enable input, via which the control of the corresponding basic function can be
requested.
• If no other basic function and no error status is active, a change-over to the corresponding
function state is effected, and the basic function can be controlled now.
• If several enable inputs are set to TRUE at the same time, the change-over to the function state
is effected with the highest priority.
Status outputs "bEnabled", "bActive" and "bDone"
If the basic function is enabled, the bEnabled status output of the basic function is set to TRUE and
the corresponding drive motion can be started via the control inputs of the basic function.
• If the basic function is currently carrying out a drive movement, this is shown by a TRUE signal
at the status output bActive.
• The basic functions "
", and "
" are only
provided with the status output bEnabled, as the drive directly follows the setpoint selection
after being enabled.
• The basic functions "
" are furthermore provided with a status output
bDone showing that the drive movement started (Homing or positioning) has been completed.
Re-deactivating the enable of a basic function
When the bEnable enable input of the active basic function is reset to FALSE, the control inputs of
the basic function are inhibited and the status outputs bEnabled, bActive and bDone are reset to
FALSE.
• If the drive is not at standstill, it is brought to standstill within the deceleration time for
if
no other basic function takes over the control of the drive. Here a change-over from the active
function state via the function state "Drive is stopped" back to the basic state "Drive at
standstill" is effected.
• When the enable input of another basic function is set to TRUE, this basic function adopts the
control of the drive immediately.
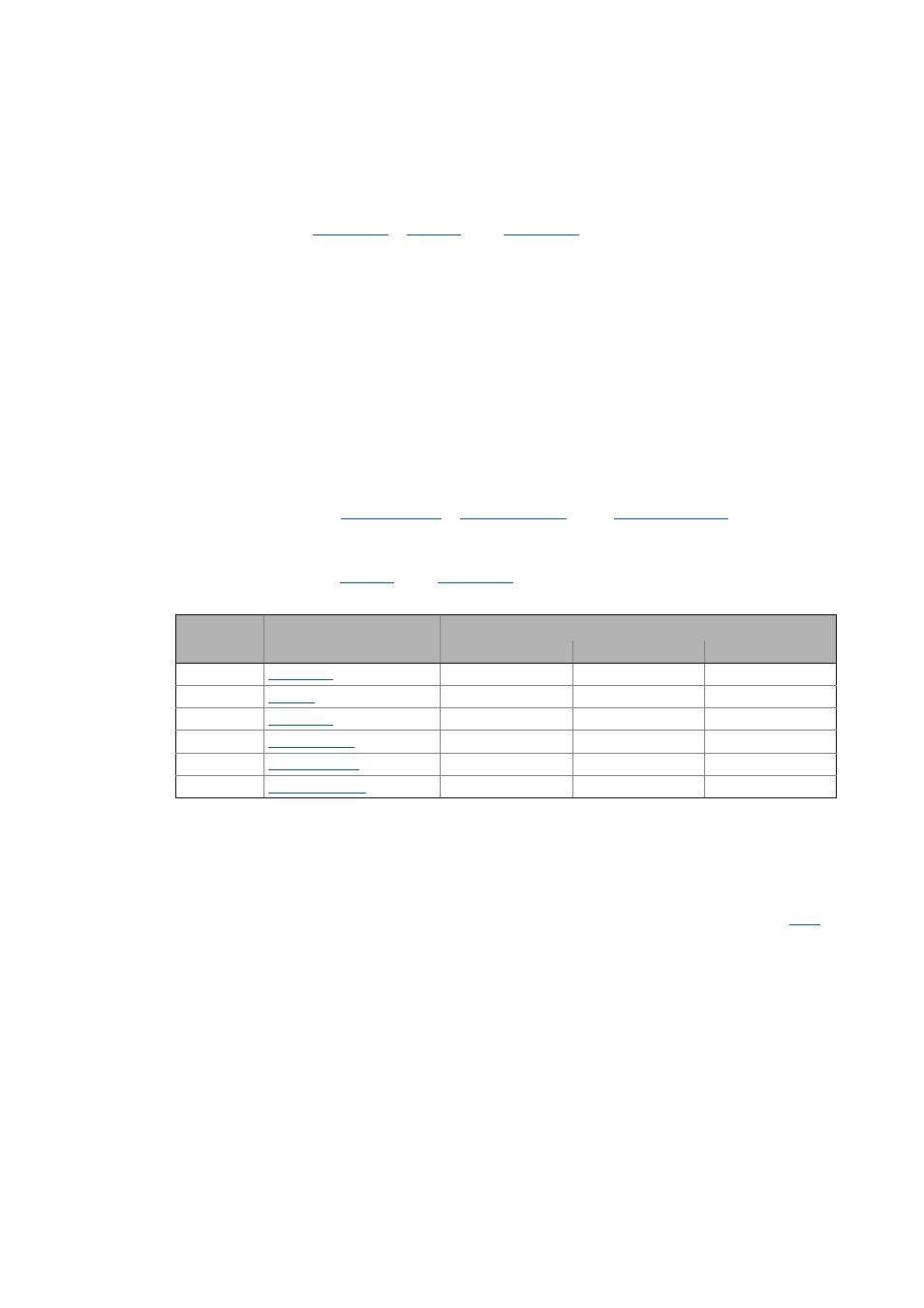
Priority
Basic function
Status outputs
bEnabled
bActive
bDone
1
2
3
4
5
6