4drive interface – Lenze 9400 User Manual
Page 111
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
111
4
Drive interface
4.7
Internal interfaces | "LS_DriveInterface" system block
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
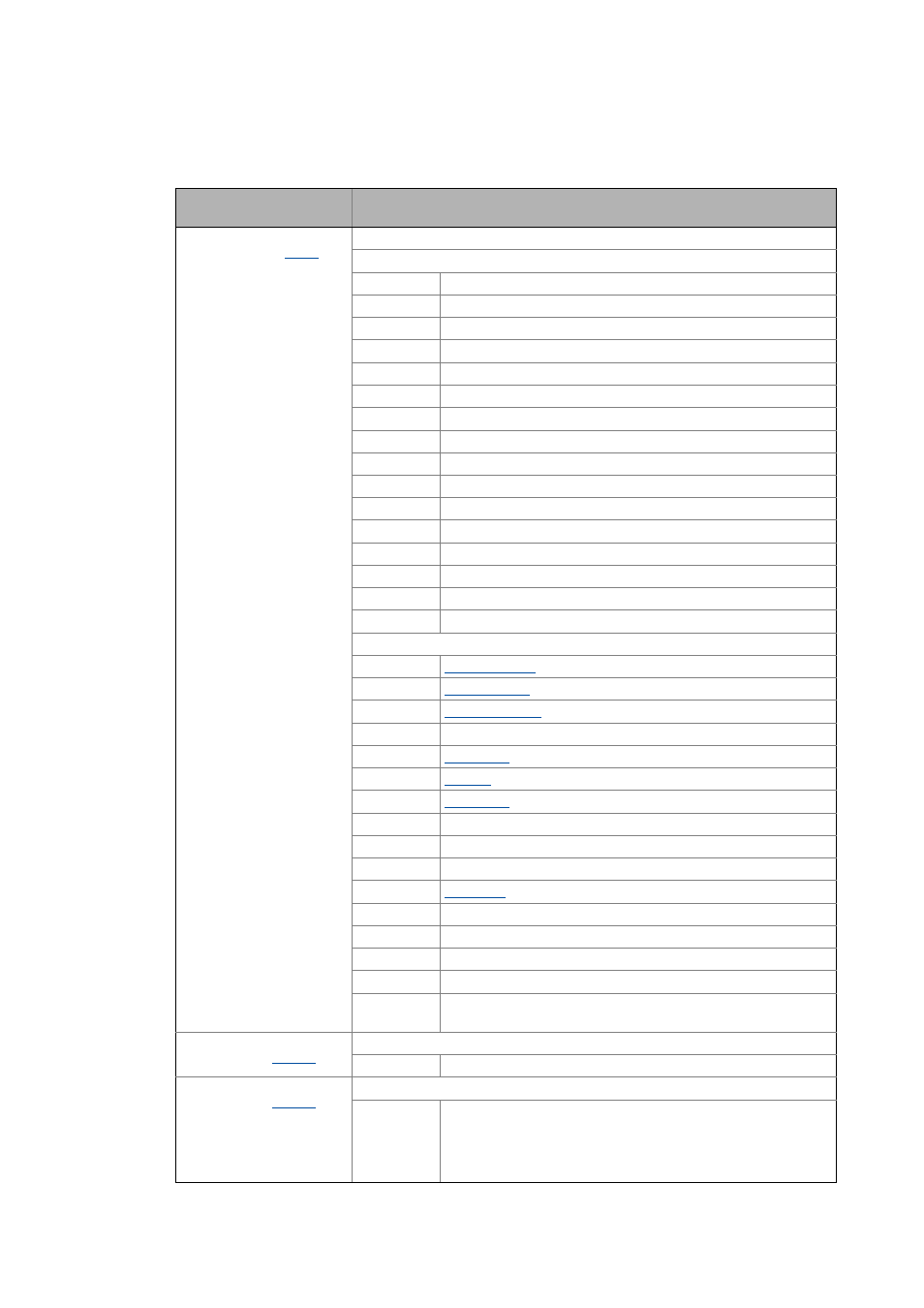
Outputs
Identifier
DIS code | data type
Value/meaning
DI_dnState
| DINT
Status (bit coded)
Status signals of the currently enabled basic function (if available):
Bit 0 -
Bit 1 Basic function is active (signal bActive).
Bit 2 Basic function is completed (signal bDone).
Bit 3 Acceleration/deceleration phase is active (signal bAccDec).
Bit 4 -
Bit 5 CCW rotation is active (signal bCcw).
Bit 6 -
Bit 7 Reference known.
Bit 8 Brake is open.
Bit 9 Waiting for clutch condition.
Bit 10 Zero crossing detected or position = "0".
Bit 11 -
Bit 12 -
Bit 13 -
Bit 14 -
Bit 15 Fault in active basic function (group signal).
Status signals of the internal state machine for the basic functions:
Bit 16
active.
Bit 17
active.
Bit 18
active.
Bit 19 Setpoint follower is active (group signal for bit 16 ...18).
Bit 20
active.
Bit 21
active.
Bit 22
active.
Bit 23 Brake test is active.
Bit 24 Drive at standstill.
Bit 25 Drive is stopped.
Bit 26
active.
Bit 27 -
Bit 28 Controller is not ready.
Bit 29 Initialisation
Bit 30 State "Fault active" (signal DI_bFailActive).
Bit 31 State machine is not ready to receive setpoints.
(Group signal for bit 28 ... 30)
DI_bReady
| BOOL
Status signal "Controller is ready for operation"
TRUE The controller is ready for operation.
DI_bFailActive
| BOOL
Status signal "Error active - acknowledgement required"
TRUE Monitoring with the "Fault" or "Quick stop by trouble" error response
has responded and the controller is in the device state "Fault active"
or "Quick stop by trouble active".
For exiting the device state the fault has to be acknowledged, e. g. via
the input DI_bErrorReset1...3.