3 parameter setting, Parameter setting, 6encoder evaluation – Lenze 9400 User Manual
Page 241
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
241
6
Encoder evaluation
6.3
Parameter setting
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
6.3
Parameter setting
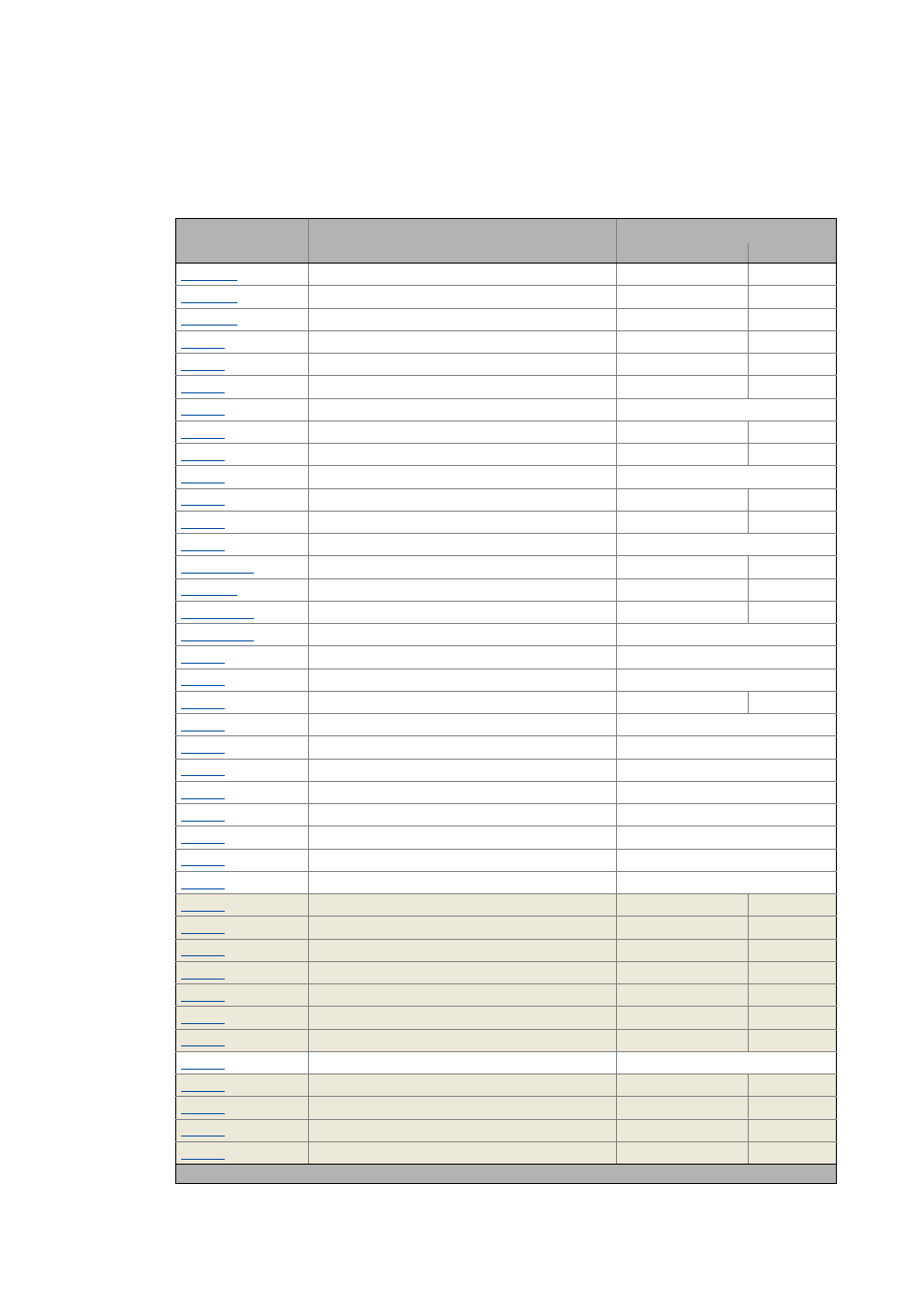
Short overview of parameters for the encoder evaluation:
Parameter
Info
Lenze setting
Value Unit
Resolver pole position
-90.0 °
Rotor displ. angle encoder
0.0 °
Module pole position
0.0 °
Number of resolver pole pairs
1
Resolver error correction
0
Dynamics of the resolver evaluation
100 %
Activate resolver error compensation
Deactivated
Number of encoder increments
512
Encoder voltage
5.0 V
Encoder type
Incremental encoder (TTL signal)
SSI encoder: Bit rate
400 kbps
SSI encoder: Data word length
25 Bit
TTL encoder signal evaluation
4x evaluation (A, B)
SSI encoder: Partword starting position
0
SSI encoder: partword length (partword 1)
31
SSI encoder: partword length (partwords 2...8)
0
SSI encoder: partword coding
Binary coded
Position encoder selection
Motor encoder
Motor encoder selection
Resolver X7
Speed act. val. time const.
2.0 ms
Resp. to speed monitoring
Off
Resp. to encoder open circuit
Fault
Resp. to resolver open circuit
Fault
Resp. to encoder fault
Fault
Resp. to angular drift of encoder
No response
Motor mounting direction
Motor rotating CW
Position encoder mounting direction
Encoder rotating CW
Position control structure
Phase controller is active
Speed setpoint (enc. eval.)
- Unit/s
Position setpoint (enc. eval.)
- Unit
Actual speed (encoder eval.)
- Unit/s
Actual position (enc. eval.)
- Unit
Following error
- Unit
External actual position
- Unit
Offset actual pos. value/setp.
- Unit
Activate Encoder
Deactivated
Resolution Multiturn
- Rev.
Encoder position
- Steps.
Encoder position
- Rev.
Encoder speed
- rpm
Greyed out = display parameter