7 setting the s-ramp time, Setting the s-ramp time, 11 basic drive functions – Lenze 9400 User Manual
Page 382: Stop
11
Basic drive functions
11.1
General information
382
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.1.7
Setting the S-ramp time
For path planning, various basic functions serve to build up or reduce the acceleration linearly. The
motion profile causes less structural vibrations and the gearboxes are protected.
The smoothening (jerk) is calculated via the S-ramp time and the maximum acceleration permitted
in the profile:
[11-3] Formula for calculating the jerk for acceleration and deceleration phases
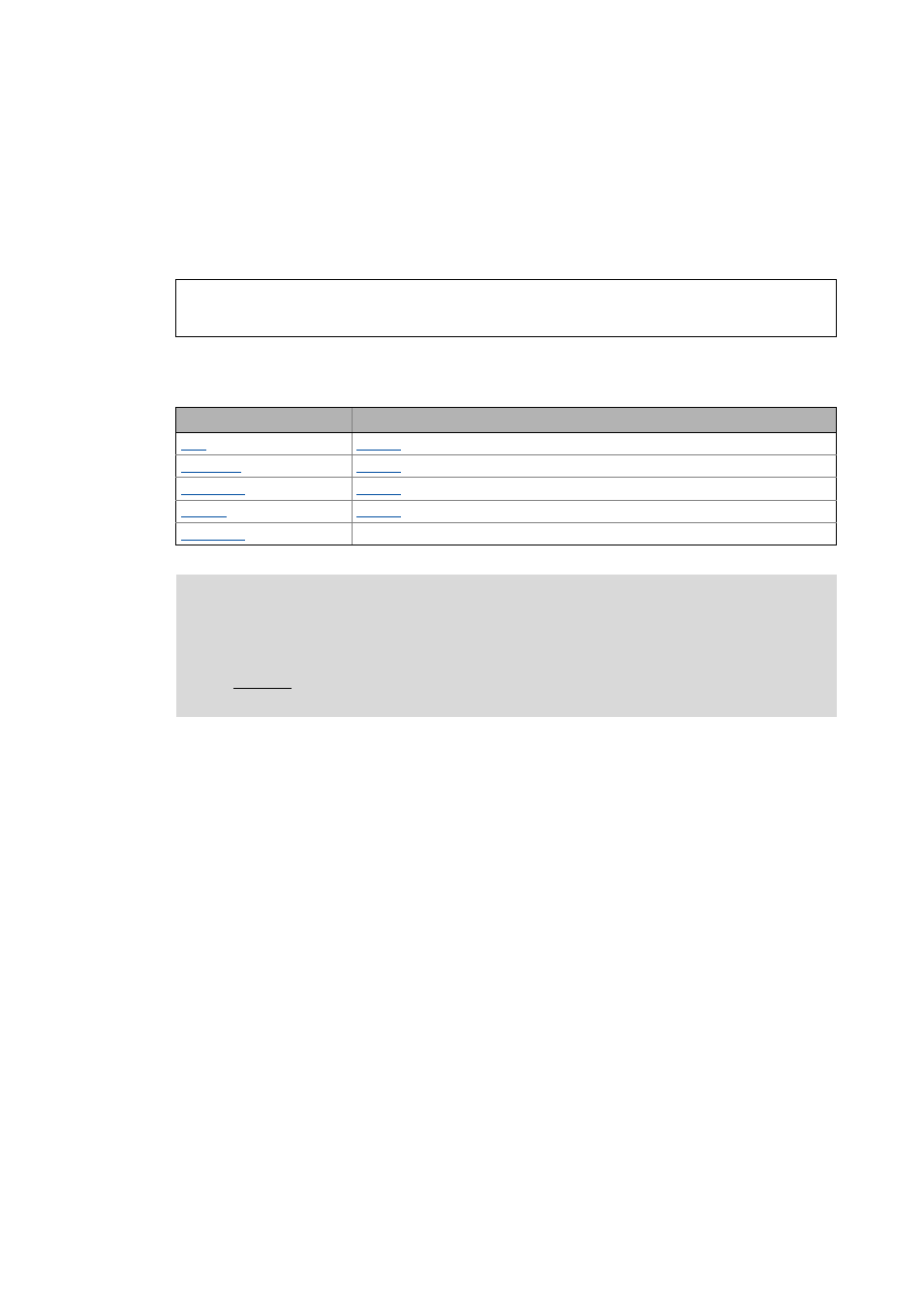
S-ramp times can be set in the given parameters for the following basic functions:
Jerk
maximum acceleration
S-ramp time
------------------------------------------------------------
=
Basic function
Parameter for S-ramp time
The S-ramp time is defined via FB L_PosPositionerTable or FB L_PosProfileTable.
Stop!
When it is switched to another basic function, the start acceleration is reduced with the
jerk of the new basic function. A small jerk causes very high speeds!
Remedy: Avoid unnecessarily long S-ramp times. Set the profile parameters of the
different basic functions so that the jerk is roughly the same for all basic functions.