3 limits of motor phase failure monitoring, 5motor interface – Lenze 9400 User Manual
Page 229
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
229
5
Motor interface
5.9
Monitoring
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.9.4.3
Limits of motor phase failure monitoring
Motor phase failure monitoring can be activated for both synchronous and asynchronous motors.
However, it is possible that a current flow cannot be detected for sure in the case of certain
operating statuses of correctly connected synchronous motors. Hence, a fault is triggered.
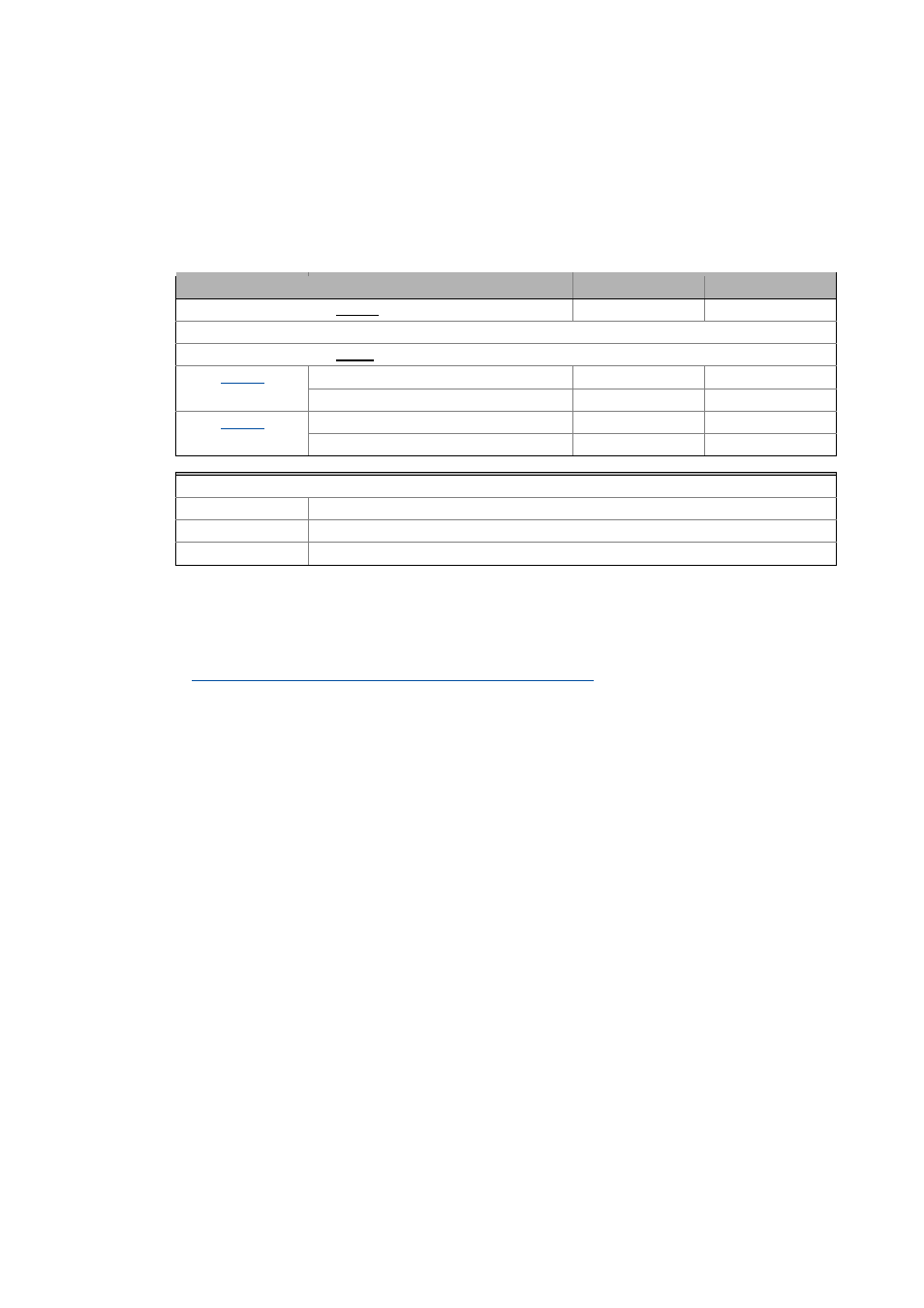
The following table provides an overview:
Special case: Hoist
The special case "Hoist" is already referred to in the chapter
Monitoring of the individual motor phases during operation
Motor phase failure monitoring may trigger a fault message in a hoist if the applied asynchronous
motor reaches the following working point:
• The hoist moves downwards, i.e. the motor is in generator mode.
• The slip frequency equals the field frequency in terms of amount. Both frequencies mutually
neutralise themselves due to their opposite effective directions.
Operating status
Synchronous motor
Async. motor
Check of the motor phases prior to operation
ž
ž
Check of the motor phases during operation
• I
q
<
at standstill
when motor is rotating
• I
q
≥
at standstill
when motor is rotating
Explanation
Phase failure is detected for sure.
Phase failure detection may trip without a fault pending.
I
q
Torque-forming current component