6 homing to end stop, 7 connection of reference switch, 8 touch probe interface configuration – Lenze 9400 User Manual
Page 426: 11 basic drive functions
11
Basic drive functions
11.6
Homing
426
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.6.2.6
Homing to end stop
By selecting the homing modes 14 & 15, homing to end stop can be executed as follows:
1. The drive travels with reduced torque in positive direction (mode 14) or negative direction
(mode 15).
2. When the drive hits an end stop so that the torque limit set in
is exceeded for the
blocking time defined in
, the reference is set.
• If a reference offset is set, traversing takes place around this offset in a correctly signed
manner.
Mode 14: positive direction to torque limit
Mode 15: negative direction to torque limit
11.6.2.7
Connection of reference switch
For the homing modes with reference switch, the HM_bHomingMark control input must be
connected to the digital input which is connected to the reference switch.
11.6.2.8
Touch probe interface configuration
The touch probe channel to be used for homing with touch probe detection in »Engineer« is selected
on the Application parameters tab in the dialog level Overview All basic functions Homing TP
interface.
• The setting carried out in this parameterisation dialog directly affects the setting of
("Homing: TP configuration") and vice versa.
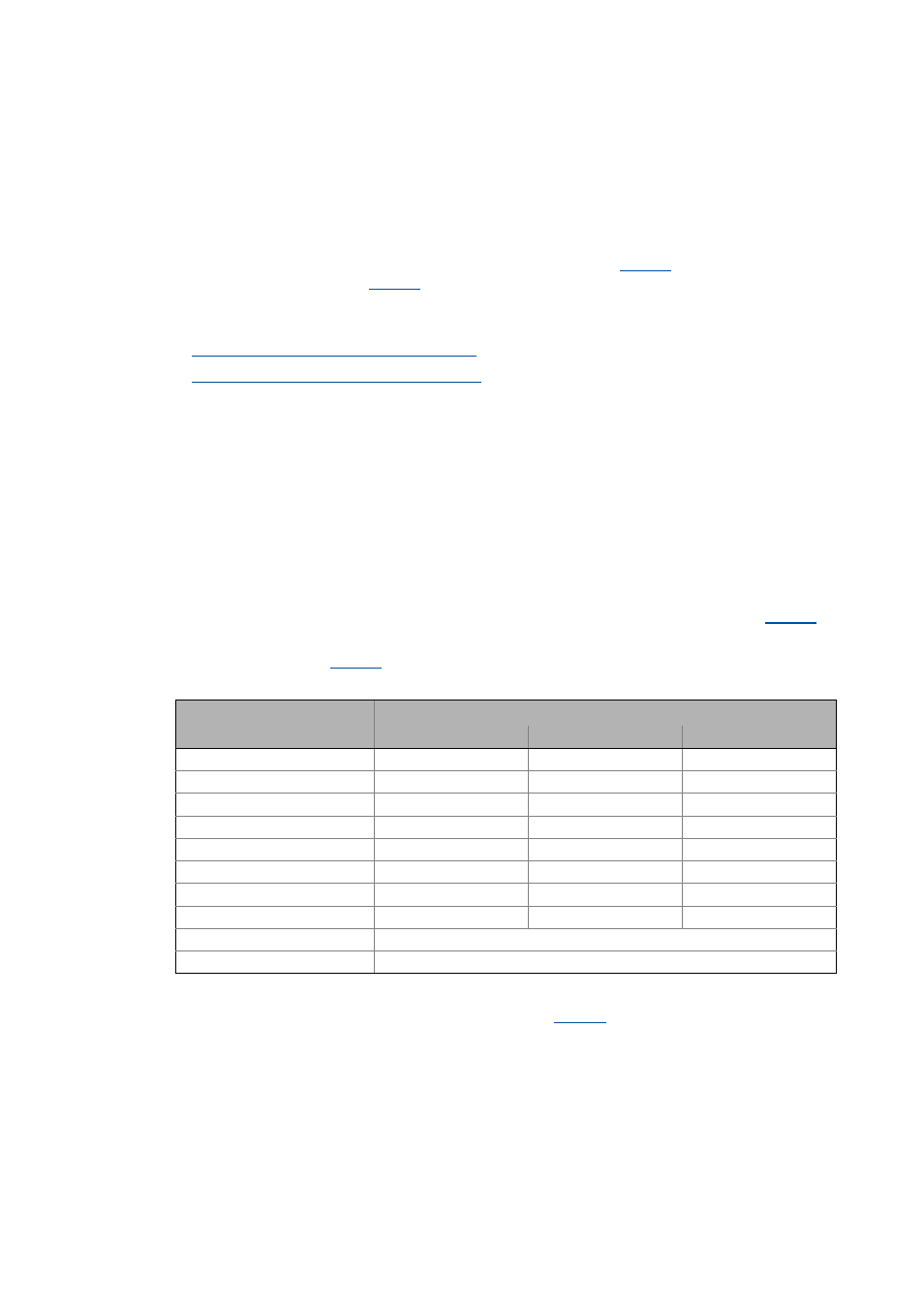
• For directly setting
(e. g. by means of the keypad) the corresponding decimal values are
listed for all configuration options in the following table:
• Example: For selecting the touch probe channel "Digital input 1" and a response only to a
negative edge, the decimal value "2" has to be set in
Selection
Touch probe channel
Touch probe response
Positive edge
Negative edge
Both edges
Digital input 1
1
2
3
Digital input 2
4
8
12
Digital input 3
16
32
48
Digital input 4
64
128
192
Digital input 5
256
512
768
Digital input 6
1024
2048
3072
Digital input 7
4096
8192
12288
Digital input 8
16384
32768
49152
Motor encoder zero pulse
65536
Position encoder zero pulse
262144