11 basic drive functions – Lenze 9400 User Manual
Page 498
11
Basic drive functions
11.10
Torque follower
498
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.10.1
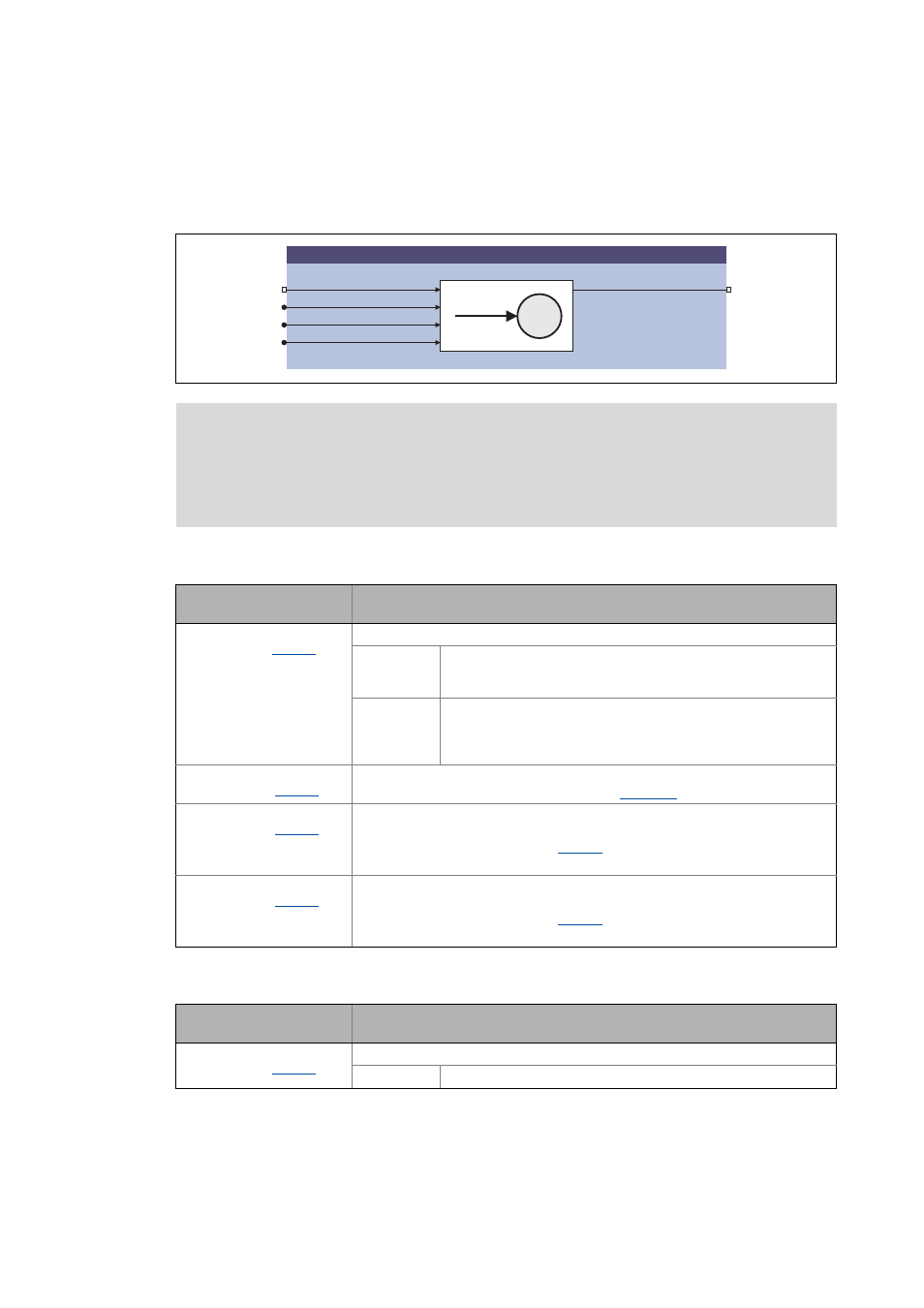
Internal interfaces | "LS_TorqueFollower" system block
The LS_TorqueFollower system block provides the internal interfaces for the basic function "Torque
follower" in the function block editor.
Inputs
Outputs
Note!
Ensure that the system block is called in a cyclic application task.
Basically, projects which only contain an unsolicited task and no cyclic task are not
permissible!
Identifier
DIS code | data type
Information/possible settings
TF_bEnable
| BOOL
Requesting control via the basic function
TRUE If no other basic function is active, a change-over to the "Torque
follower active" function state is carried out, and the setpoints
defined are accepted.
TRUEFALSE If no other basic function takes over the control of the drive, the drive
is brought to standstill, i. e. a change-over from the active function
state "Torque follower active" via the "Drive is stopped" function
state back to the basic state "Drive at standstill" is carried out.
TF_dnTorqueSet_n
| DINT
Torque setpoint in [%]
• 100 % ≡ motor reference torque (display in
TF_dnSpeedHighLimit_n
| DINT
Upper speed limit value in [%] for speed limitation
• For positive direction of motion.
• 100 % ≡ Motor reference speed (
• Negative values are limited internally to the value "0".
TF_dnSpeedLowLimit_n
| DINT
Lower speed limit value in [%] for speed limitation
• For negative direction of motion.
• 100 % ≡ Motor reference speed (
• Positive values are limited internally to the value "0".
Identifier
DIS code | data type
Value/meaning
TF_bEnabled
| BOOL
Status signal "Basic function is enabled"
TRUE The defined setpoints are accepted.
LS_TorqueFollower
TF_bEnable
TF_dnTorqueSet_n
TF_dnSpeedHighLimit_n
TF_dnSpeedLowLimit_n
TF_bEnabled
M
Torque
setpoint