11 basic drive functions – Lenze 9400 User Manual
Page 435
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
435
11
Basic drive functions
11.6
Homing
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
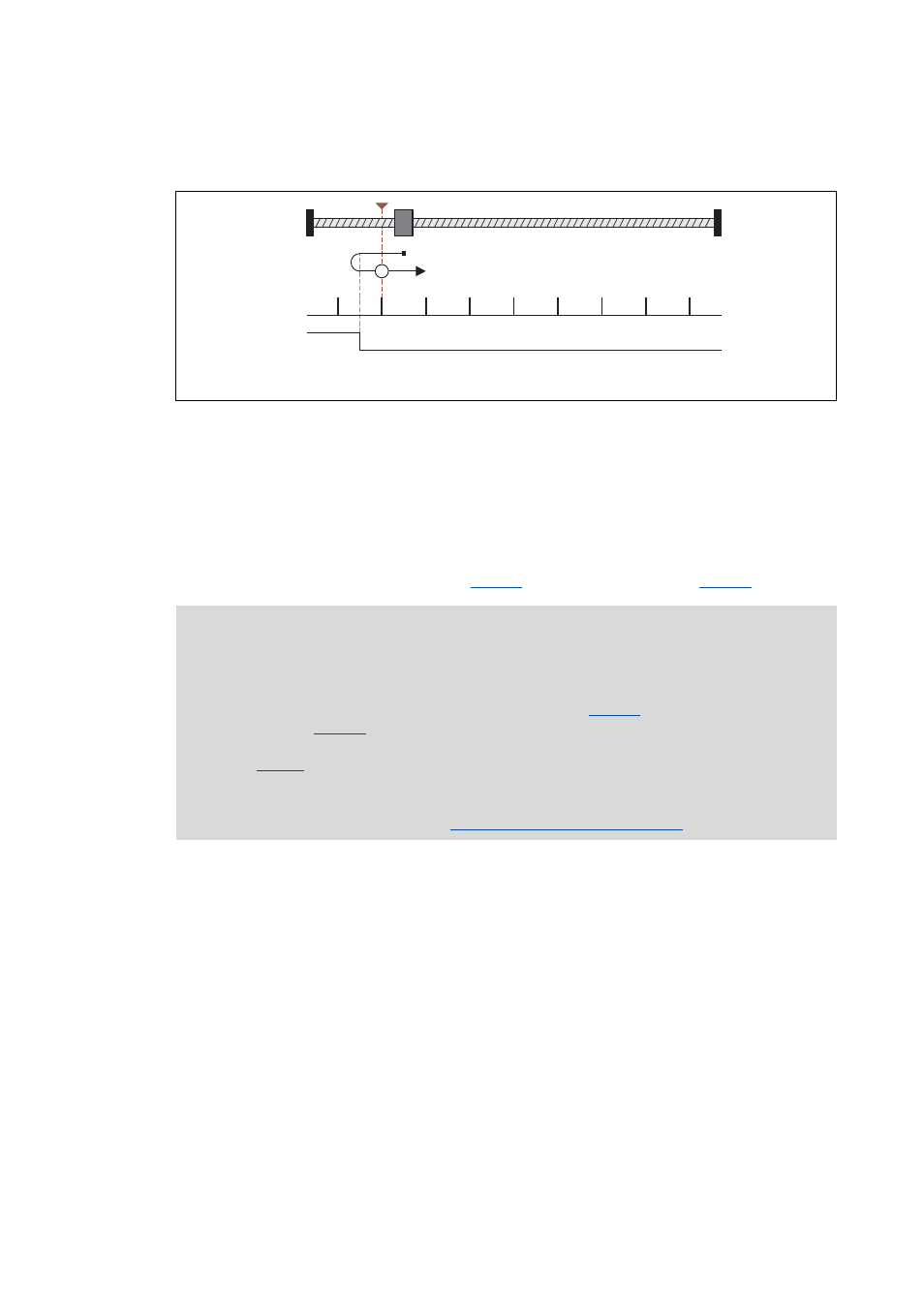
Mode 11: neg. direction - reversing to limit switch - to TP
Procedure:
1. Movement in negative direction with profile data set 1.
2. Reversing when the edge of the negative travel range limit switch is positive and, at the same
time, activation of profile data set 2 for continued reference searching.
3. The touch probe signal is evaluated while reserving the limit switch.
4. The following positive edge of the touch probe sensor sets the reference.
5. Absolute positioning to target position (
) with profile data set 2 (if
= "0").
Touch probe/zero pulse
Negative travel range limit switch
Note!
The touch probe detection is already activated after reversing to the travel range limit
switch, i.e. the home position may be set to the travel range limit switch.
• We therefore recommend to set a target position (
) unequal to the home
position (
), in order to reenable the activated limit switch. Otherwise, the
positioning process to the target position may be aborted by the basic function
"
" (see status signal HM_dnState).
• We recommend the use of the DS402 homing methods 1 and 2 if the touch probe
detection (especially the one of the motor zero pulse) is to be activated after the travel
range switch has been left.
Overview of DS402 homing modes
1
0
1