2 parameter setting, 9"can on board" system bus – Lenze 9400 User Manual
Page 330
9
"CAN on board" system bus
9.9
Monitoring
330
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.9.1.2
Parameter setting
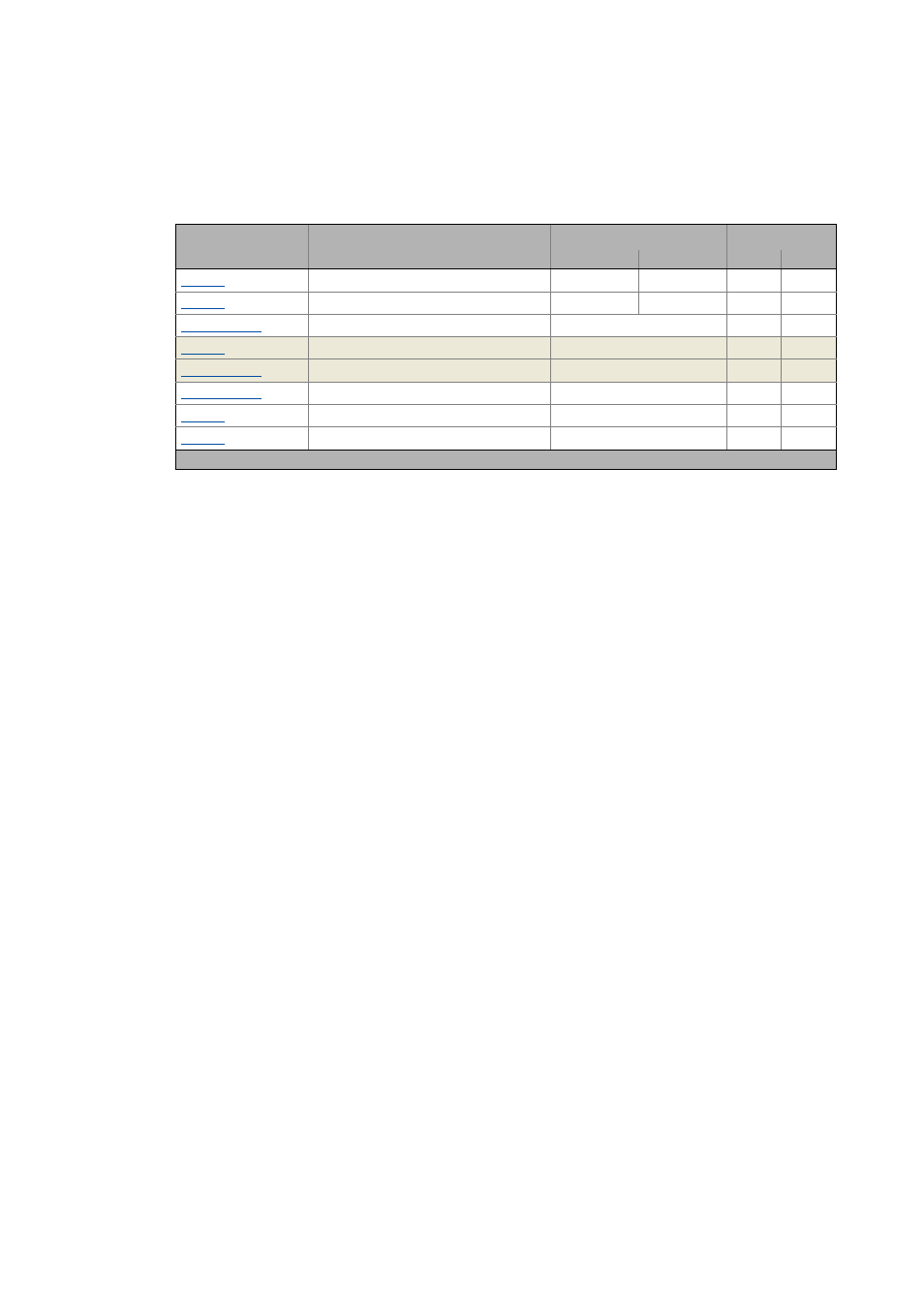
Short overview of parameters for the "Node Guarding" monitoring function:
Guard time
The time interval with which the NMT master transmits the RTR telegram is the "Guard Time".
• For each NMT slave to be monitored an individual time interval can be set.
• The RTR telegram prompts the NMT slave to send its current status.
Node life time
The "Node Life Time" is the product of the "Guard Time" and the "Life Time Factor":
Node Life Time = Guard Time x Life Time Factor
• "Life time factor" and "Guard time" have to be known to the NMT master. For this, the values
from the NMT slave are read at each reboot, or defined values are sent to the NMT slave at each
reboot.
• It is possible to select a different "node life time" for each NMT slave to be monitored.
OK status
The status of the connection is ok (OK status) if within the "Node life time"
• the NMT slave has received an RTR telegram from the NMT master and
• the NMT master has received a correct response from the requested NMT slave.
In the OK status the monitoring times for the NMT master and the NMT slave are reset and the node
guarding protocol is continued.
Parameter
Info
Lenze setting
Assignment
Value Unit
Master
Slave
CAN guard time
0 ms
CAN life time factor
0
CAN node guarding
0x00000000
CAN Node Guarding Activity
-
CAN node guarding status
-
Resp. to CAN node guarding error
No response
Resp. to CAN life guarding error
No response
CAN behaviour in case of fault
Pre-operational state
Greyed out = display parameter