5 optimise pull-out slip limitation, 5motor interface – Lenze 9400 User Manual
Page 195
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
195
5
Motor interface
5.6
V/f control (VFCplus)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.6.2.5
Optimise pull-out slip limitation
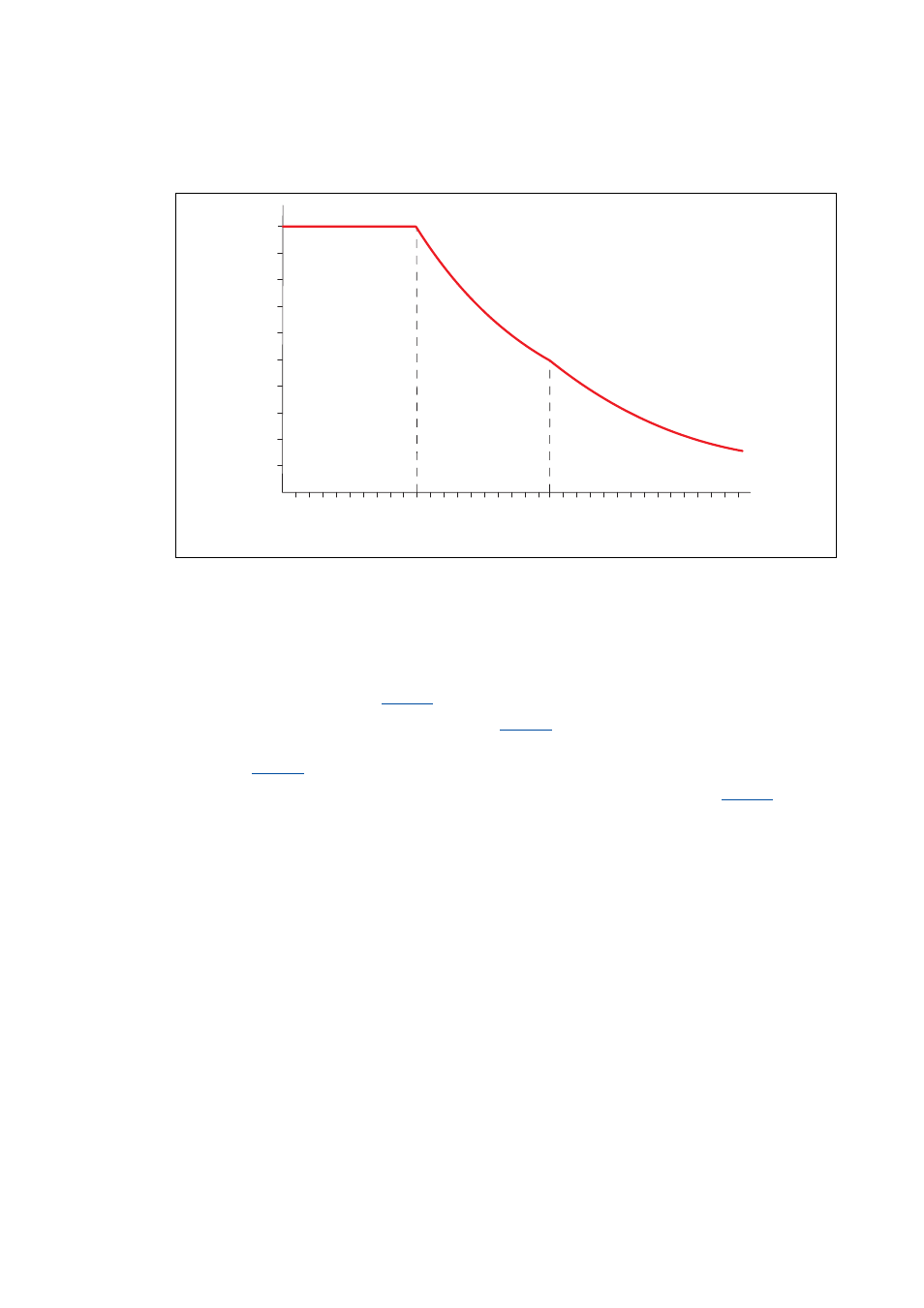
[5-19] Speed/torque curve of the asynchronous motor with two field weakening ranges and
The operating range of an asynchronous motor consists of the voltage control range and the field
weakening range. The field weakening range again is divided into two ranges:
• In the first range , the power can be kept constant without causing motor stalling.
• The second field weakening range is characterised by the fact that the maximum permissible
stator current (defined via
"Maximum current") is reduced to prevent motor stalling.
The override point (n
2
, M
2
) can be influenced via
("VFC: Override point of field weakening").
If the motor stalls in the field weakening range, the override point (n
2
, M
2
) can be adjusted by
so that motor stalling is avoided.
If the motor does not provide sufficient torque in the field weakening range,
must be
increased.
0
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3.0
3.1
3.2
3.3
3.4
n1
M = M2 * n2 /n
2
2
M2
n2
M = Mmax
M = Mmax * n1/n
0
1
2