3 standstill monitoring, 11 basic drive functions – Lenze 9400 User Manual
Page 526
11
Basic drive functions
11.12
Brake control
526
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Status monitoring by "Motor brake control module status"
(See signal path in fig.
)
• Indirect status detection of the brake function.
• Monitoring of the motor brake control module and the electrical brake circuit.
Status monitoring by "Brake function test"
(See signal path in fig.
or
• Direct function test of the complete brake circuit by microswitches at the brake.
• Wear control of the brake rotor.
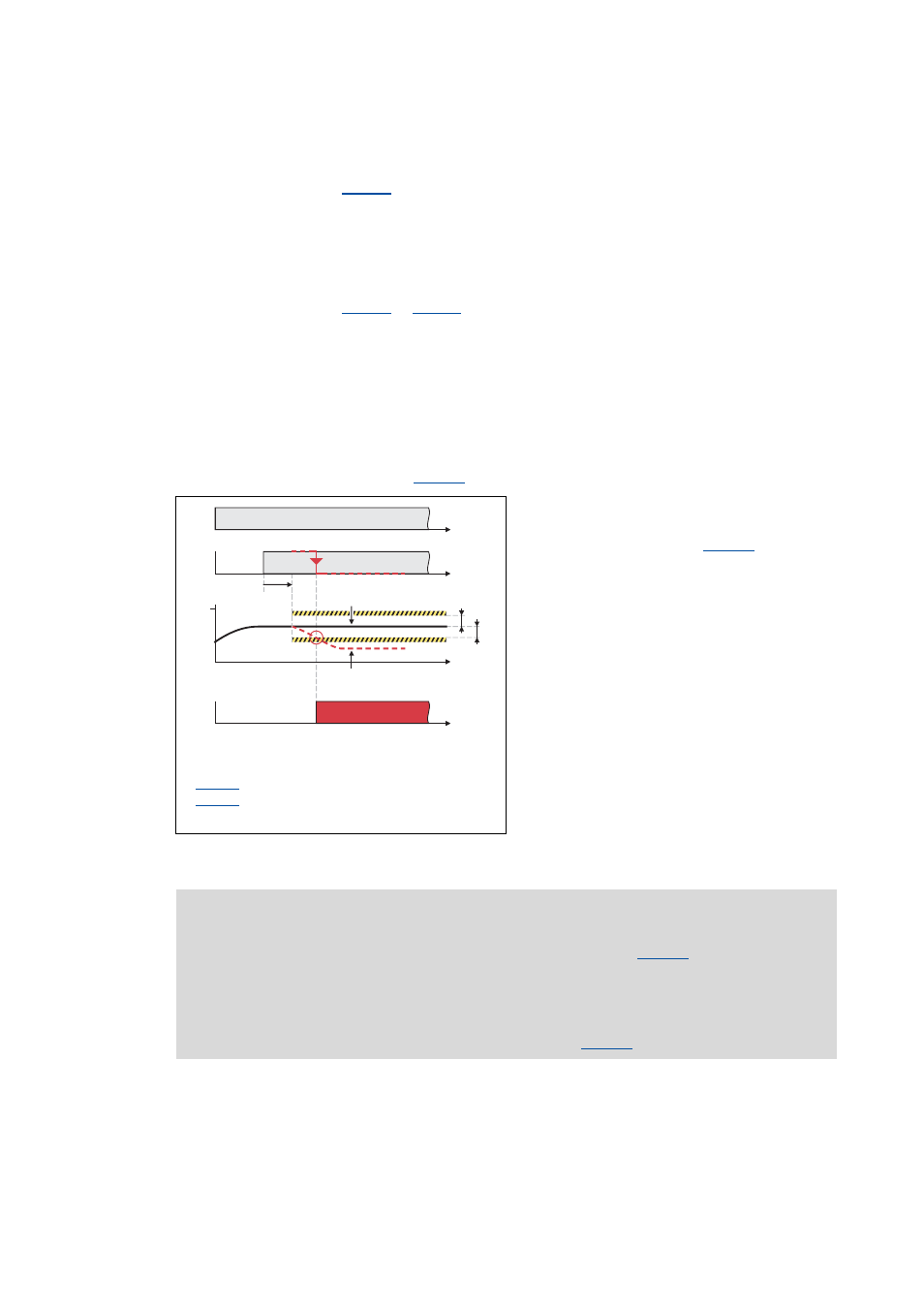
11.12.2.3 Standstill monitoring
After the brake closing time and the waiting time for the status monitoring have elapsed, the
standstill monitoring becomes active, i. e. the holding position is noted and compared to the
permissible angle of rotation set in
(Lenze setting: 5°) when the brake is applied.
[11-32] Automatic monitoring of the holding position
Normal behaviour
Error behaviour
: Waiting time - status monit.
: Permissible angle of rotation
CINH = controller inhibit
• If the stop position of the motor axis has
changed by more than the permissible
angle of rotation set in
, although
the brake is engaged:
• The error message "Motor brake:
Angular drift with closed brake too
high" is entered into the logbook.
• "Quick stop by trouble" is activated as
error response to avoid a further
rotation/acceleration of the drive.
• The error output BRK_bError is set to
TRUE for one task cycle.
• The status "position drift when brake is
applied" is displayed at the BRK_dnState
status output via bit 21 for one task
cycle.
t
t
j
BRK_bError
0
1
t
t
Stopping/Standstill
CINH
Controller enabled
Note!
The standstill monitoring can be switched off by the setting
= "0°".
For the encoderless motor control types
(from software version V3.0)
the following
applies:
If the V/f control or the sensorless vector control is selected, the standstill monitoring is
generally switched off, irrespective of the setting in
.