4drive interface – Lenze 9400 User Manual
Page 41
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
41
4
Drive interface
4.1
Machine parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
The following only applies to software version V3.0:
• If a position, speed, or acceleration which cannot be represented internally is defined via
parameters, the value defined is rejected.
• If an internal counter overflow of a parameter value due to a subsequent change of the machine
parameters for the gearbox ratio, feed constant, or resolution of an encoder revolution is
detected, the "Fault" error response is triggered and a corresponding error message is entered
in the logbook of the controller:
Tip!
Possible measures for error correction:
• Plausibility check of the machine parameters set for gearbox ratio, feed constant, or
resolution of an encoder revolution.
• Set parameters with a counter overflow to a value which can also be represented
internally.
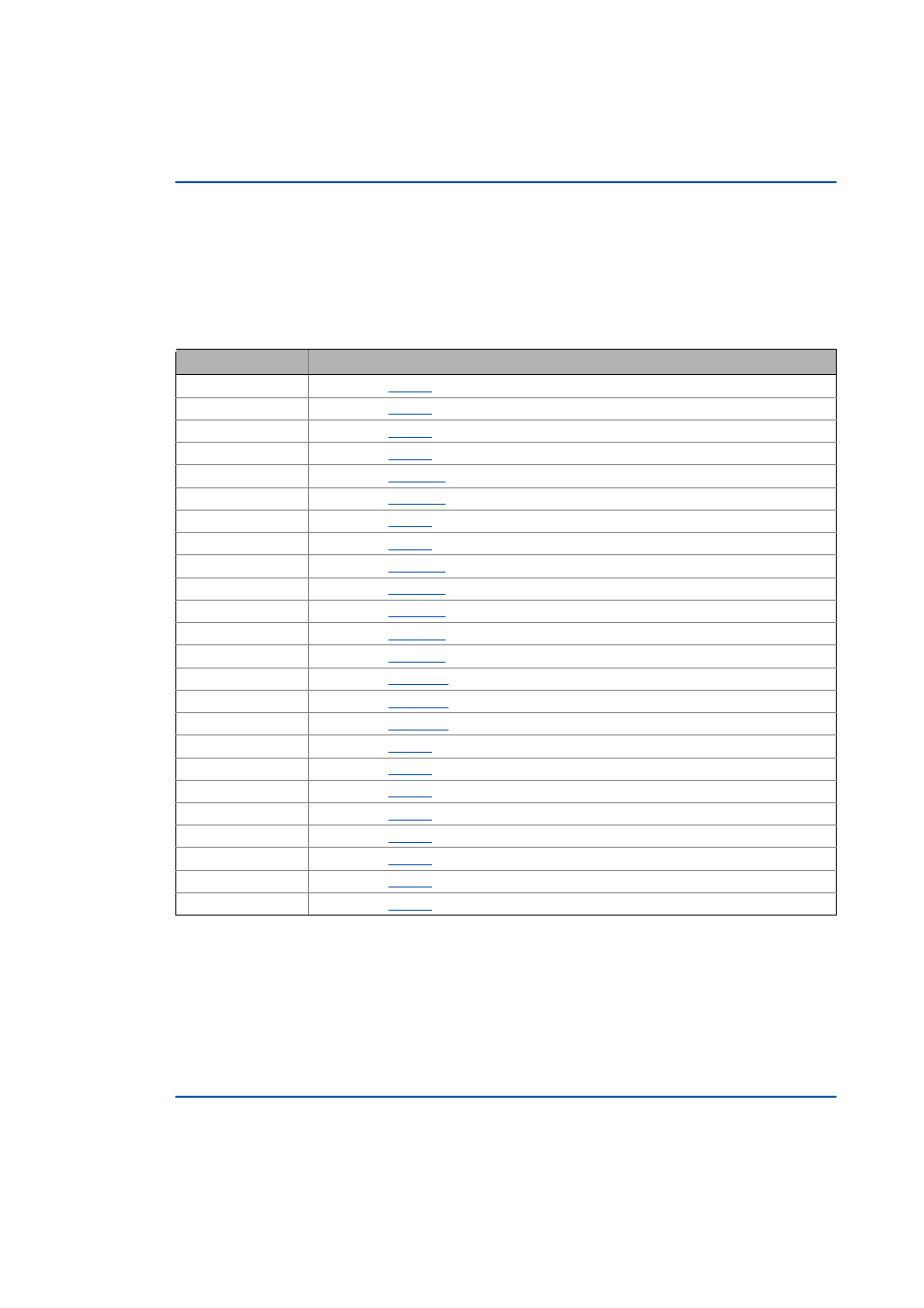
Error number
Error message
0x00B8001A
Int. overflow
(manual speed 1)
0x00B8001B
Int. overflow
(manual speed 2)
0x00B8001C
Int. overflow
(manual acceleration)
0x00B8001D
Int. overflow
(manual deceleration)
0x00B80020
Int. overflow
0x00B80021
Int. overflow
0x00B80022
Int. overflow
(maximum speed)
0x00B80023
Int. overflow
(maximum acceleration)
0x00B80024
Int. overflow
0x00B80025
Int. overflow
0x00B80026
Int. overflow
0x00B80027
Int. overflow
0x00B80028
Int. overflow
0x00B80029
Int. overflow
(decel. limited speed 2)
0x00B8002A
Int. overflow
(decel. limited speed 3)
0x00B8002B
Int. overflow
(decel. limited speed 4)
0x00B8002C
Int. overflow
(maximum distance manual jog)
0x00B8002D
Int. overflow
(home position)
0x00B8002E
Int. overflow
(homing: target position)
0x00B8002F
Int. overflow
(homing: speed 1)
0x00B80030
Int. overflow
(homing: acceleration 1)
0x00B80031
Int. overflow
(homing: speed 2)
0x00B80032
Int. overflow
(homing: acceleration 2)
0x00B80033
Int. overflow
(positioning: tolerance for target position)