11 basic drive functions – Lenze 9400 User Manual
Page 531
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
531
11
Basic drive functions
11.12
Brake control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Waiting time for status monitoring
Every time the brake status changes, the waiting time set in
is awaited after the brake
opening or brake closing time has elapsed, before the monitoring of the motor brake control
module and the status input BRK_bBrakeApplied (if activated via
) and the standstill
monitoring function are switched active again.
• During the "Closing the brake" process, a mechanical contact must signal the "brake closed"
state after the waiting time has elapsed.
• During the "Releasing the brake" process, a mechanical contact must signal the "brake released"
state after the waiting time has elapsed.
Tip!
The additional waiting time is based on the fact that during the state change of the brake
also state changes with regard to the monitored signals within the brake logic can occur,
e. g. by bouncing the microswitch on the brake, or activation of the short circuit threshold
within the motor brake control module due to discharge current peaks when the brake
voltage is switched on. These state changes result in the activation of the monitoring
function, although no stationary fault is pending.
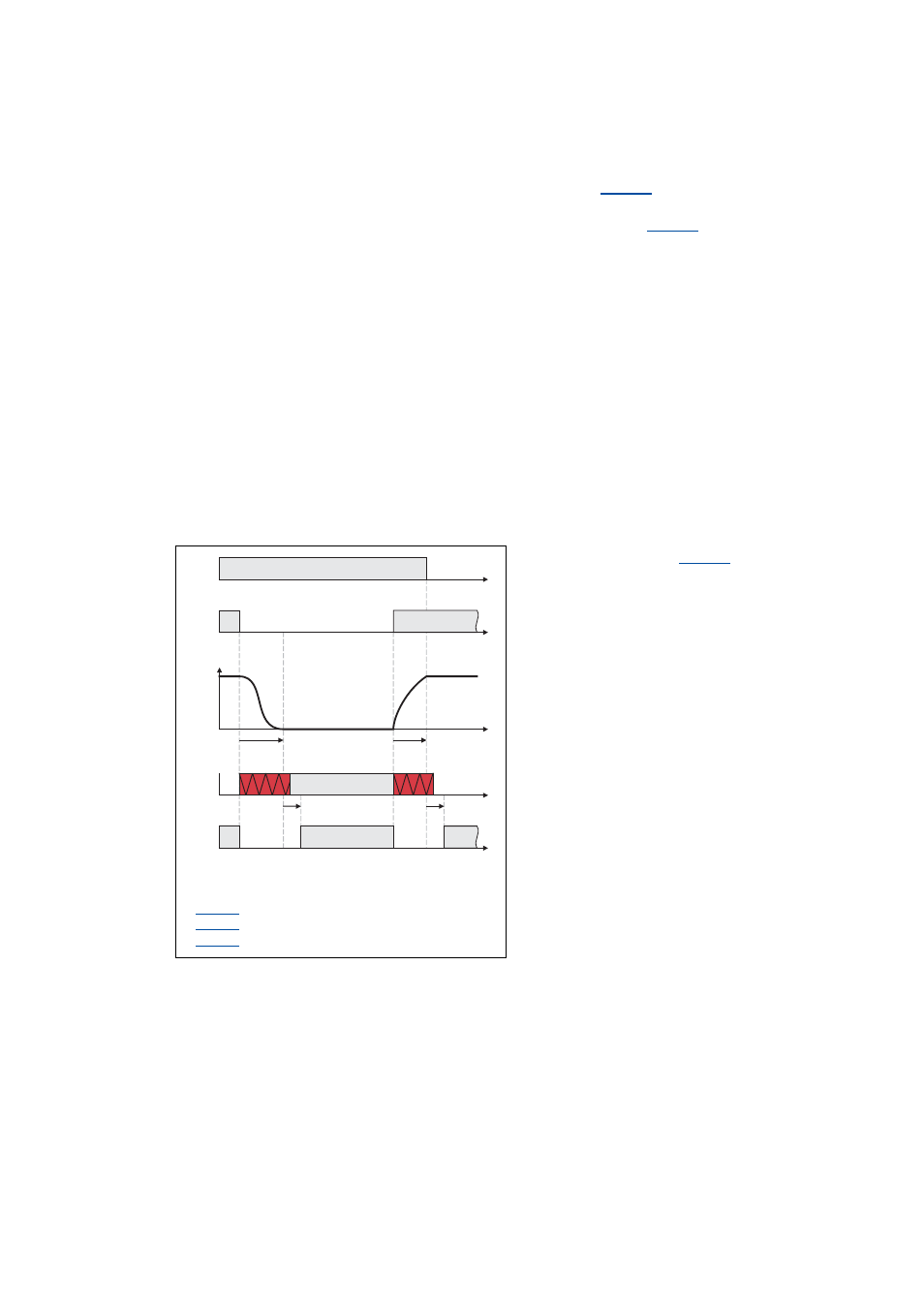
[11-37] Definition of the waiting time for status monitoring
Brake status (with bouncing or transient response)
Active status monitoring
: Brake closing time
: Brake opening time
: Waiting time - status monit.
• The waiting time in
must be set so
that bouncing of a feedback contact and
the transient response of the brake current
monitoring will be suppressed completely.
• If no corresponding feedback takes place
after the waiting time has elapsed:
• The error output BRK_bError is set to
TRUE until the next trigger attempt
starts.
• The error response "Quick stop by
trouble" is activated.
• The error message "Brake status error" is
entered into the logbook.
t
t
t
0
1
t
t
Stopping/Standstill
BRK_bReleaseBrakeOut
I
BRK