1 parameterising speed and torque controller, Parameterising speed and torque controller, 5motor interface – Lenze 9400 User Manual
Page 165
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
165
5
Motor interface
5.5
Sensorless vector control (SLVC)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.5.1.1
Parameterising speed and torque controller
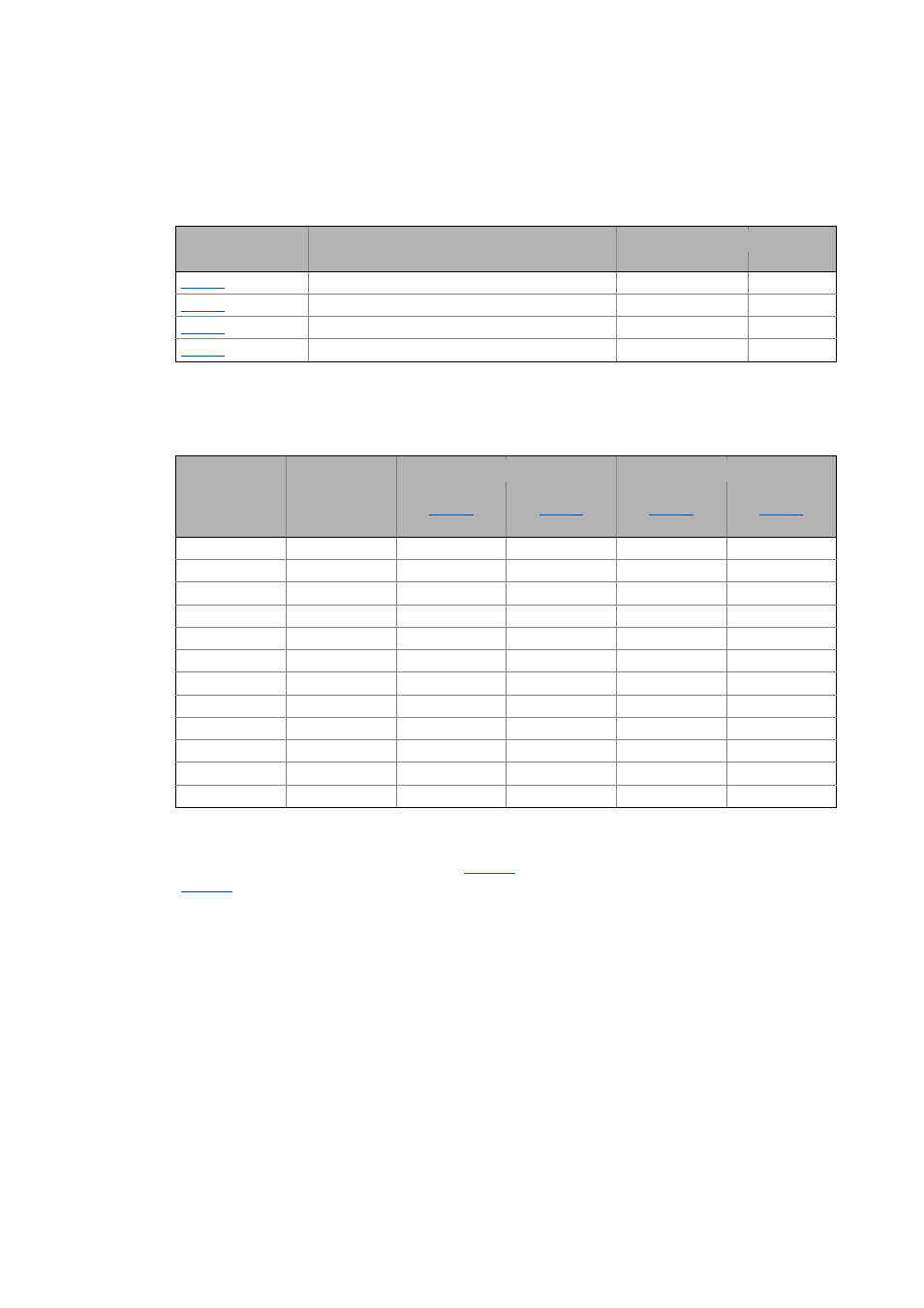
Short overview: Parameters for controller settings
Typical controller settings
The following table contains typical guide values concerning the setting of the speed and torque
control for different device types/motor powers:
[5-8]
Typical controller settings
The gain for the field current controller (
) and the gain for the cross current controller
(
) are initially set to "0.00".
Parameter
Info
Lenze setting
Value Unit
Speed controller gain
0.500 Nm/rpm
Speed controller reset time
24.0 ms
SLVC: Torque controller gain
0.5000 Hz/A
SLVC: Torque controller reset time
10.00 ms
Device type
Motor power
Speed controller
Torque controller
E94ASx
(4-pole standard
ASM)
Gain
[Nm/rpm]
Reset time
[ms]
Gain
[Hz/A]
Reset time
[ms]
E0024
0.37 kW
0.0122
50.00
5.0833
10.00
E0034
0.75 kW
0.0138
50.00
3.0500
10.00
E0044
1.50 kW
0.0264
50.00
1.9818
10.00
E0074
3.00 kW
0.0411
50.00
1.1077
10.00
E0134
5.50 kW
0.0674
50.00
0.5965
10.00
E0174
7.50 kW
0.1183
50.00
0.3303
10.00
E0244
11.00 kW
0.1183
50.00
0.3303
10.00
E0324
15.00 kW
0.2244
50.00
0.2368
10.00
E0474
22.00 kW
0.3442
50.00
0.1547
10.00
E0594
30.00 kW
1.1503
50.00
0.1232
10.00
E0864
45.00 kW
1.7400
50.00
0.0817
10.00
E1044
55.00 kW
2.1712
50.00
0.0661
10.00