3 overview of the lenze homing modes, Apter, Overview of the lenze homing modes – Lenze 9400 User Manual
Page 427: Overview, Of the lenze homing modes, 11 basic drive functions
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
427
11
Basic drive functions
11.6
Homing
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.6.3
Overview of the Lenze homing modes
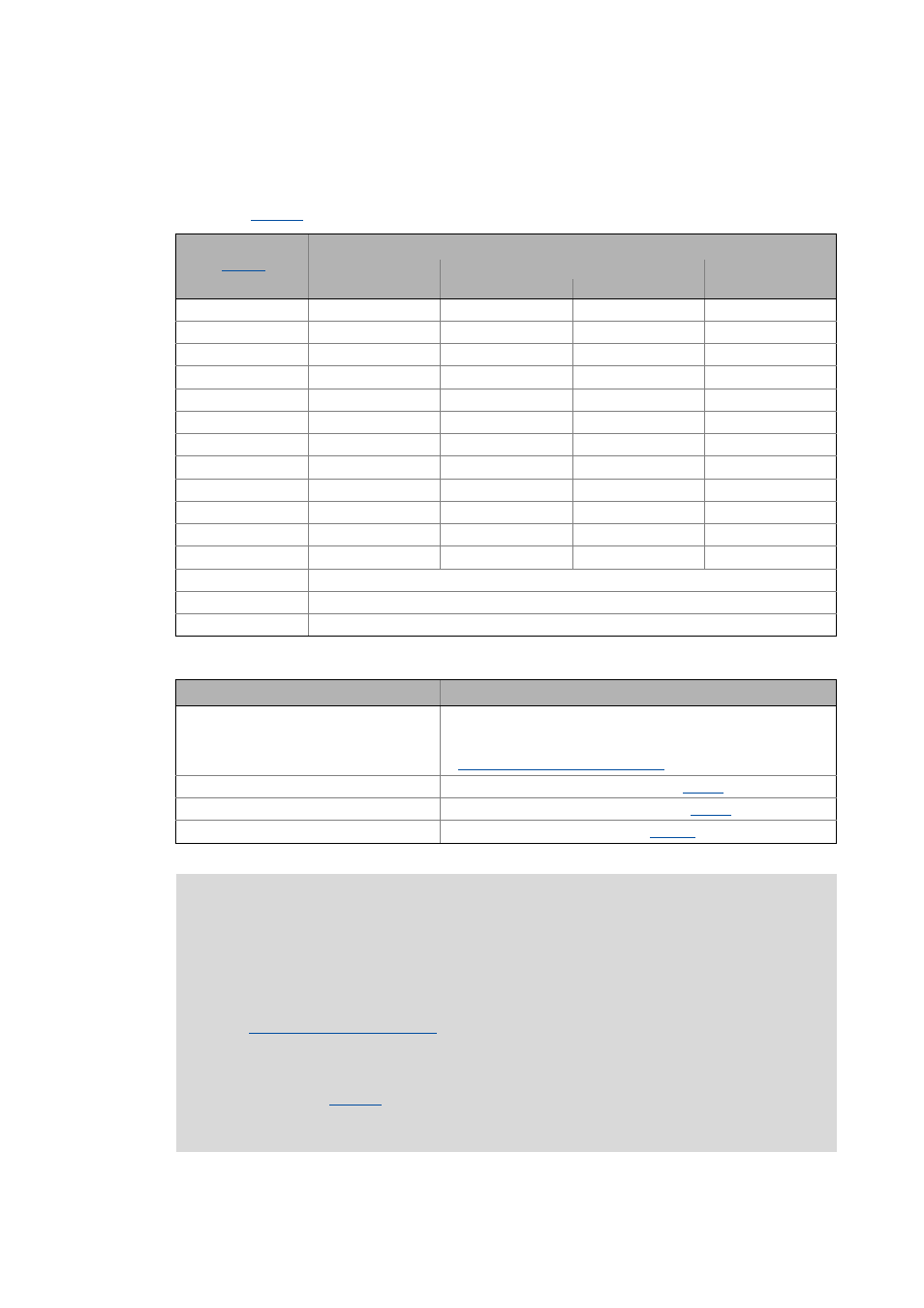
In the following subchapters the procedures of homing modes 0 ... 15 are described, which can be
The switches/sensors are evaluated via the following internal interfaces:
Homing mode
Evaluated signals/sensors
Touch probe sensor/
encoder zero pulse
Travel range limit switch
Reference switch at
HM_bHomingMark
Negative limit switch
Positive limit switch
0
1
2
3
4
5
8
9
10
11
12
13
14
Positive direction of rotation to torque limit.
15
Negative direction of rotation to torque limit.
100
Set reference directly.
Switch/sensor
Internal interface for digital input signal
Touch probe sensor
DIGIN_bIn1 ... DIGIN_bIn8
• Alternatively the motor encoder or position encoder zero pulse
can be evaluated.
Touch probe interface configuration ( 426)
Positive travel range limit switch
LIM_bLimitSwitchPositive (basic function "
")
Negative travel range limit switch
LIM_bLimitSwitchNegative (basic function "
Reference switch
HM_bHomingMark (basic function "
")
Note!
Profile data set change-over
For the reference search, two profile data sets with different speeds and accelerations
can be parameterised. In this way, the homing time can be reduced and at the same time
the accuracy can be increased.
The following process descriptions give information about the time the change-over to
the profile data set 2 takes place in the corresponding homing mode.
If the speed 2 (
) is set to "0" (Lenze setting), no change-over to the profile data set
2 takes place and the reference search and positioning to the target position is only
executed with the profile parameters of the profile data set 1.