1 correction of the stator leakage inductance, Correction of the stator leakage inductance, Correction – Lenze 9400 User Manual
Page 201: Of the stator leakage inductance, 5motor interface
Lenze · Servo-Inverter 9400 HighLine · Reference manual · DMS 10.0 EN · 11/2013 · TD05/06
201
5
Motor interface
5.8
Parameterisable additional functions
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.1
Correction of the stator leakage inductance...
...and the current controller parameters by means of the saturation characteristic
The current controller must be adjusted to the electrical characteristics of the motor stator
resistance (
) and stator leakage inductance (
). In case of modern motors, the stator
leakage inductance changes with the height of the current so that a new current controller setting
is required for each current height.
When the motor is operated with very low and very high currents (e.g. in Pick and place
applications), it is not always possible to achieve a satisfactory current controller setting for all
operating points. For this purpose, the correction of the stator leakage inductance and current
controller parameters is now possible via an adjustable saturation characteristic that can be set in
(17 interpolation points).
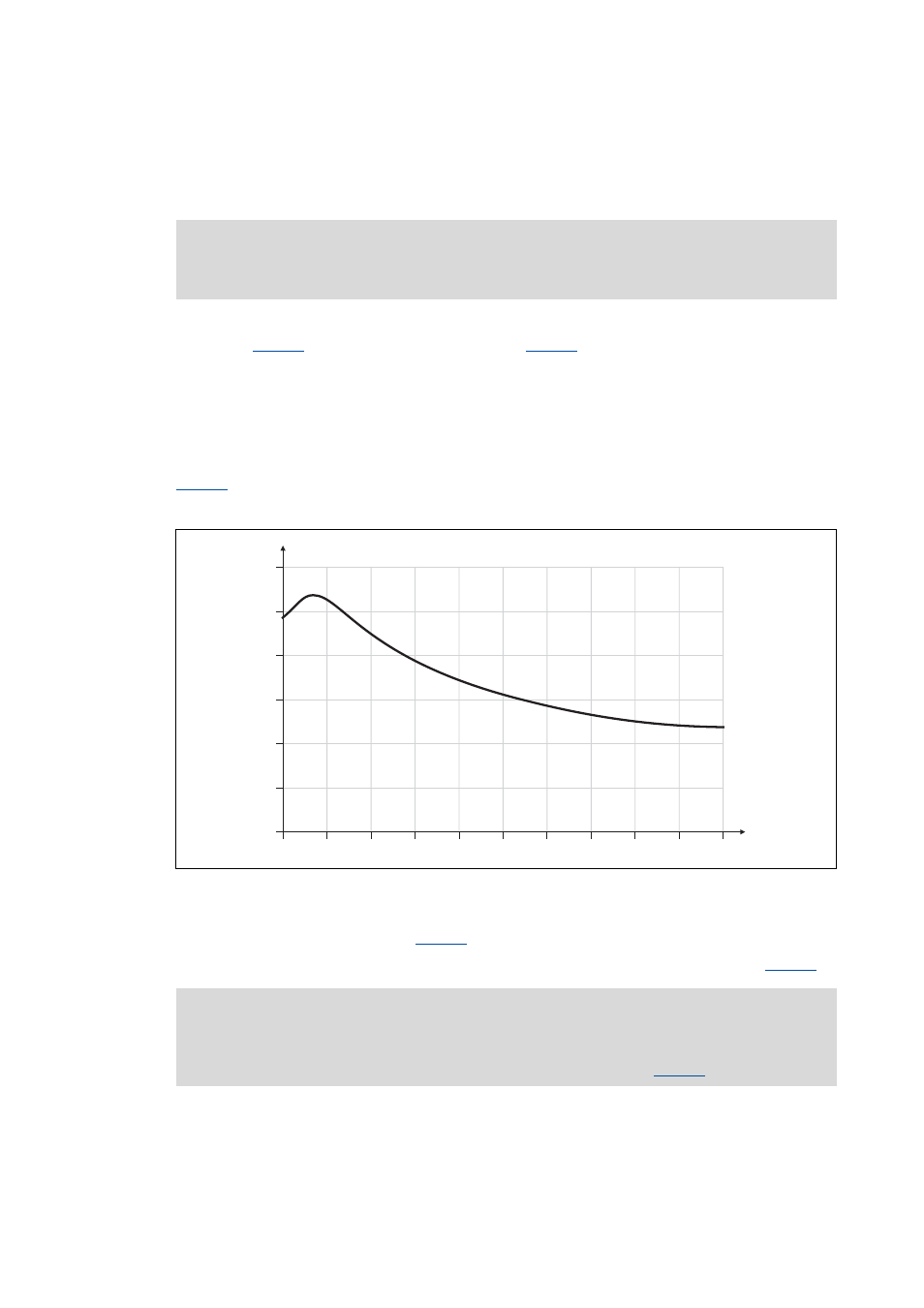
The following picture shows a typical saturation characteristic of an MCS motor:
[5-22] Saturation characteristic: Inductance referring to the inductance for rated current
• By optimising the current controller with different current setpoints such a characteristic can be
determined "by trial" and set in
.
• The correction by means of this saturation characteristic can be switched on/off via
Note!
Function only possible for servo control!
0 %
10 %
20 %
30 %
40 %
50 %
60 %
70 %
80 %
90 %
100 %
0 %
20 %
40 %
60 %
80 %
100 %
120 %
I/I
max
L/L
n
Note!
The saturation characteristic is not only used for the correction of the current controller
but also influences the current controller feedforward control (
).